Open World Foundation Models in the Omniverse: Engines of Synthetic Environments for Physical AI
Physical AI—the software brain for robots, autonomous vehicles, drones, and industrial machines—must reason about space, time, and physics under uncertainty. Training such systems requires diverse, physically grounded data across weather, lighting, materials, and human behavior. Real-world collection is slow, costly, and sometimes unsafe. Physically based synthetic data generation, driven by NVIDIA Omniverse and open world foundation models (WFMs) like Cosmos, addresses that gap by scaling environments, annotations, and edge cases on demand.
Recent advances consolidate world generation and domain transfer into cohesive workflows. Cosmos Predict 2.5 unifies Text2World, Image2World, and Video2World in a lightweight architecture that produces consistent, controllable multi-camera video worlds from a prompt, an image, or a clip. Paired with Cosmos Transfer 2.5, teams can vary appearance—weather, lighting, terrain—while preserving spatial structure and physics plausibility. The result is rapid iteration for perception, planning, and control across wider distributions than any field deployment can afford.
Because WFMs are grounded in OpenUSD, teams can move assets, materials, and scene graphs fluidly among toolchains in Unity, Unreal Engine, ROBLOX, and Omniverse. Connectors enable art and engineering teams to collaborate without format friction, while physics solvers enforce realism. The consequence is not just more data—it is better, more representative data that tightens the sim-to-real loop.
Equally important, open model licensing of Cosmos WFMs and their customizable reasoning give developers precise control over scene composition and constraints. In contrast to purely generative video tools, these WFMs respect geometry, dynamics, sensors, and lighting, enabling verifiable tests. For physical AI, fidelity to cause-and-effect matters more than style alone.
Consider a logistics startup building a sidewalk delivery robot. Field hours capture only typical days. With a WFM pipeline, the team can instantiate rare hazards—backlit pedestrians, reflective puddles, or fog-diffused headlights—then annotate at scale with pixel-perfect segmentation and simulated LiDAR. The robot’s perception stack learns not only to recognize objects, but to anticipate physics-consistent outcomes.
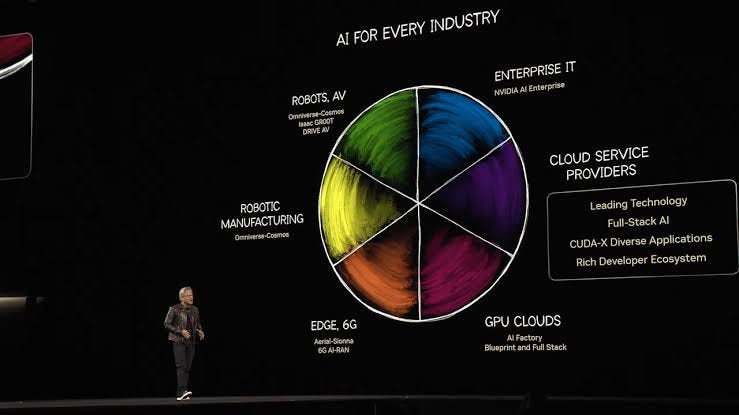
Cross-industry demand follows. Aerospace programs test autonomous inspection under harsh hangar lighting. Energy companies simulate refinery maintenance around moving crews. Cities rehearse fleet interactions with micro-mobility. The broader the world model, the stronger the deployed policy.
- 🧠 Reason about physics: collisions, friction, occlusion, and contact dynamics.
- 🌧️ Expand edge cases: low sun angles, snow glare, gusts, and sensor dropouts.
- 🎯 Exact labels: segmentation, depth, flow, and 3D boxes aligned across cameras.
- ⚡ Faster iteration: swap conditions without re-shooting real-world footage.
- 🔄 Hybrid workflows: mix real logs with synthetic assets for stronger generalization.
| Data Modality 🚀 | Strengths ✅ | Gaps ⚠️ | Best Use 🔧 |
|---|---|---|---|
| Real-world only | High authenticity, emergent complexity | Sparse edge cases, expensive, safety risks | Benchmarking final policies |
| Synthetic only | Infinite variation, perfect labels, safe | Potential domain gap | Pretraining and stress testing |
| Hybrid (recommended) 🌟 | Best of both worlds, controlled diversity | Requires tooling integration | Production-grade pipelines |
As the next section unpacks the pipeline, one theme endures: controllable worlds are the fastest path to robust physical AI.
From Prompt to Photorealistic Worlds: Cosmos Predict 2.5 and Transfer 2.5 in Practice
A reproducible pipeline lets engineering teams scale from a phone-captured site scan to a world-scale simulation with cameras, LiDAR, and actors. A common four-part flow combines Omniverse libraries, Isaac tools, and Cosmos WFMs to go from reference to training set.
Reference-to-World Workflow With OpenUSD
Start by reconstructing reality. With Omniverse NuRec, teams rebuild digital twins from a smartphone sweep, yielding a metrically accurate OpenUSD scene. Next, populate with SimReady assets—physically correct materials, rigs, and sensors that render consistently across path tracers and rasterizers in Unity, Unreal Engine, and Omniverse. Then use Isaac Sim MobilityGen to stage trajectories, agents, and traffic logic. Finally, invoke Cosmos Predict 2.5 for multi-view video synthesis and Cosmos Transfer 2.5 to apply controlled appearance shifts.
Two upgrades stand out. First, Predict 2.5 consolidates three models—Text2World, Image2World, Video2World—so a single image or short clip can expand into multi-camera, time-coherent sequences. Second, Transfer 2.5 delivers 3.5× smaller model size, faster performance, and better prompt alignment while preserving scene geometry. This combination cuts costs while expanding coverage.
- 🗺️ NuRec: capture a site with a phone and reconstruct geometry, materials, and scale.
- 🧩 SimReady assets: plug-and-play 3D models, sensors, and rigs for consistent physics.
- 🚦 MobilityGen: traffic actors, routes, and edge cases like stalled vehicles.
- 🎥 Cosmos Predict 2.5: consistent multi-camera video from a prompt or reference.
- 🎨 Cosmos Transfer 2.5: spatially aware style transfer across cameras and time.
| Capability 🧩 | Predict 2.5 🎥 | Transfer 2.5 🎨 | Benefit 📈 |
|---|---|---|---|
| Input types | Text, image, video | World-to-world | Flexible authoring |
| Output | Multi-camera, time-consistent video worlds | Style-changed but spatially faithful scenes | Data diversity without drift |
| Performance | Lightweight, unified model | 3.5× smaller vs prior gen ⚡ | Faster cycles, lower TCO |
| Physics fidelity | Geometry-aware synthesis | Preserves structure and constraints | Trustworthy evaluation |
Industrial design teams can prototype vehicles in sim, then validate aerodynamics, lighting sensors, and control policies at scale. For deeper context on how AI-accelerated physics is reshaping engineering cycles, see this perspective on AI physics propelling aerospace and automotive design. Robotics leaders can also explore how open-source frameworks for next-gen robotics shorten time to production.
Because OpenUSD composes cleanly with game engines and content platforms, creators in Epic Games ecosystems extend a world into ROBLOX for synthetic interaction data, then bring assets back into robotics simulation. The same assets can be exercised by reinforcement learning stacks from OpenAI, Meta AI, and Microsoft Research, while safety evaluation follows research protocols inspired by Google DeepMind and historical DeepMind papers on generalization under distribution shift.
When the pipeline is templated, new sites and scenarios become a repeatable button press. The essential pattern is simple: reference → compose → generate → vary → evaluate.
Case Studies: Skild AI, Serve Robotics, and Zipline Close the Sim-to-Real Gap
Practitioners are already proving the value of WFM-driven synthetic data. Consider three deployments where scale, control, and physics awareness translate directly into operations.
General-Purpose Robot Brains at Skild AI
Skild AI uses Isaac Lab to build scalable training farms across robot embodiments and tasks. With Cosmos Transfer, the team augments limited real captures with new lighting, weather, and textures to stress-test policies before hardware trials. The result is faster transfer to real platforms and a cut in field hours—no small gain when each attempt requires safety crews and downtime checks.
Serve Robotics: At-Scale Urban Autonomy
Serve Robotics trains on thousands of NVIDIA Isaac Sim scenarios, mixing synthetic with real logs. The company has grown one of the largest autonomous robot fleets operating in public spaces and surpassed 100,000 deliveries across urban blocks. Their robots collect roughly 1 million miles monthly and nearly 170 billion image-LiDAR samples. That data cycles back into simulation, where edge cases are replayed and expanded, yielding safer navigation in dense neighborhoods.
Beyond food, Serve recently delivered compute power—dropping off DGX Spark personal AI supercomputers to creators like Refik Anadol and Will.I.AM, and platform teams at Ollama. With roughly 1 PFLOP of AI performance, DGX Spark enables on-desk fine-tuning, inference, and robotics development—accelerating the loop from idea to deployment. For a broader industry context, see this analysis of how AI physics accelerates engineering workflows.
Zipline: Edge AI at Flight Speed
Zipline leans on the NVIDIA Jetson edge AI and robotics platform for drone delivery. A recent DGX Spark drop-off to Zipline’s Half Moon Bay facility underscores how cloud-to-edge synergies matter: heavy training in data centers; fast sim-based validation with Cosmos; compact Jetson inference in the field. World models help encode the complex aerodynamics of suburban corridors—tree canopies, powerlines, wind shear—without risking aircraft.
- 🚚 Serve Robotics: replay urban near-misses and scale rare corner cases.
- 🛩️ Zipline: simulate corridor-level winds, occlusions, and lighting shifts.
- 🤖 Skild AI: unify policy training across arms, wheels, and bipeds.
- 🧱 Cosmos Transfer: expand variation while preserving geometry.
- 🧪 Isaac Lab/Sim: standardized, repeatable experiment scaffolds.
| Organization 🏢 | Key Tools 🧰 | Scale Metrics 📊 | Outcome 🎯 |
|---|---|---|---|
| Serve Robotics | Isaac Sim + Cosmos | 100k+ deliveries; 1M miles/month; 170B samples | Safer urban autonomy 🚦 |
| Skild AI | Isaac Lab + Cosmos Transfer | Cross-embodiment training at scale | Faster sim-to-real transfer ⏩ |
| Zipline | Jetson + Cosmos + DGX Spark | High-frequency flight validation | Reliable edge inference ✈️ |
These case studies reflect a broader pattern: simulate broadly, validate precisely, deploy confidently. For teams evaluating open components, reference the overview of open frameworks that accelerate robotics innovation.
Industrial-Grade Data Diversity: Lightwheel, FS Studio, and Mining Operations at Scale
WFM pipelines affect not just autonomy, but every workflow where perception and control depend on hard-to-get labels and rare failure modes. Several deployments showcase how domain experts apply synthetic data to measurable outcomes.
Lightwheel: Simulation-First, OpenUSD at the Core
Lightwheel helps manufacturers bridge the sim-to-real gap with SimReady assets and large-scale synthetic datasets. Built on OpenUSD, Lightwheel’s environments replicate asset materials, sensor models, and factory floor dynamics. Robots trained in these worlds behave more predictably during commissioning, cutting downtime and MTTR. Because assets are portable, the same models can be stress-tested across Unity, Unreal Engine, and NVIDIA Omniverse renderers, catching corner cases early.
Mining: Boulder Detection and Cost Avoidance
Omniverse community member Santiago Villa uses synthetic data to spot large boulders before they jam crushers. Each undetected incident can delay operations by seven minutes or more, costing up to $650,000 annually in lost throughput. By generating thousands of automatically annotated images under varied lighting and weather, mining operators improve recall while keeping labeling costs in check. The net effect is fewer stalls, reduced wear, and safer work zones.
FS Studio: Logistics Throughput Gains
In a partnership with a global logistics leader, FS Studio created thousands of photorealistic package variants using Omniverse Replicator. Training on this dataset improved object detection accuracy and reduced false positives—directly increasing belt speed and system throughput. A similar approach can vet ROBLOX-style interaction data for human-robot co-navigation and port it back into Omniverse for safety regression, lending a consumer-scale realism to industrial scenarios.
Robots for Humanity and Scott Dempsey: Depth of Teleoperation and Parts Handling
Robots for Humanity built a full Isaac Sim environment for oil and gas, generating RGB, depth, and segmentation while capturing Unitree G1 joint data via teleoperation. Scott Dempsey developed a cable synthesizer that builds variants from manufacturer specs and augments training sets with Cosmos Transfer, improving cable detection and manipulation. Both efforts emphasize the principle: structure matters. When appearance changes yet geometry stays intact, models generalize without losing calibration.
- 🏭 OpenUSD portability: one scene graph, many renderers and engines.
- 🧪 Replicable experiments: deterministic seeds for fair A/B testing.
- 📦 Domain richness: logistics, mining, energy, and retail under one framework.
- 🧵 Fine-grained variation: materials, cables, barcodes, and pallet textures.
- 🛡️ Safety before fielding: virtual rehearsals for high-risk tasks.
| Use Case 🛠️ | Tools 🔌 | Metric/Impact 📈 | Notes 🧭 |
|---|---|---|---|
| Mining boulder detection | Omniverse + synthetic images | Up to $650k/yr saved | Varied lighting and weather 🌦️ |
| Logistics package detection | Replicator + SimReady | Higher precision, fewer false positives | Throughput and belt speed gains 🚚 |
| Cable manipulation | Isaac Sim + Cosmos Transfer | Improved grasp success | Manufacturer-spec synthesizer 🧵 |
| Teleop policy learning | Isaac Sim + Unitree G1 | Better sim-to-real stability | Depth + segmentation training 🧩 |
These deployments show a shared lesson: physics-consistent variation delivers durable gains when combined with rigorous evaluation.
The Ecosystem Convergence: OpenUSD, Omniverse, and Research Leaders Shaping Physical AI
Physical AI thrives where content, simulation, and research intersect. The recent release of Cosmos world foundation models—presented alongside Omniverse advances at flagship industry events—signals a shift toward open, customizable reasoning for world generation. Trained on millions of hours of robotics and driving videos, these WFMs give developers unprecedented control over scene composition while respecting physics.
Research groups at OpenAI, Microsoft Research, Meta AI, and Google DeepMind continue to explore generalization, planning, and agentic stacks that benefit from controllable synthetic worlds. Techniques like curricula, domain randomization, and system identification become more effective when scenarios are rendered with consistent materials, sensors, and dynamics. Historical DeepMind work on distribution shift underscores why reproducibility—seeded variation and traceable prompts—must sit at the heart of evaluation.
Toolchain convergence helps teams integrate content platforms with simulation, then back to training. Unity and Unreal Engine continue to serve real-time authoring, Epic Games expands high-fidelity workflows, and ROBLOX contributes social interaction dynamics relevant for HRI. With OpenUSD as the shared substrate, assets move across ecosystems without losing semantics, while NVIDIA Omniverse coordinates rendering, sensor simulation, and world logic.
Industrial players are already applying these patterns to digital factories and robotic twins. Omniverse “mega factory” and robotic twin blueprints clarify how to configure fleet-scale simulators with standard parts. For practitioners building from scratch, start with hands-on guides and reference workflows, then fold in WFMs for data diversity. A complementary overview of open-source robotics frameworks pairs well with this take on AI-enhanced engineering speedups.
- 📚 Learn fast: Getting Started with Isaac Sim paths for ROS 2, sensors, and data.
- 🧪 Reference workflows: Generative AI pipelines for synthetic data generation.
- 🍳 Cosmos Cookbook: step-by-step recipes for WFM prompts, control, and evaluation.
- 📱 Phone-to-twin: capture a site on iPhone and reconstruct in Isaac Sim.
- ☁️ NVIDIA Brev: preconfigured GPU environments for physical AI experiments.
| Actor 🌐 | Contribution 🔬 | Interface 🔗 | Impact 💥 |
|---|---|---|---|
| NVIDIA Omniverse | Rendering, sensor sim, digital twins | OpenUSD connectors | Photorealistic, physics-aware data |
| Cosmos WFMs | World generation + style transfer | Predict 2.5, Transfer 2.5 | Diversity with structural fidelity 🌉 |
| OpenAI / Google DeepMind | Planning and generalization research | RL, model-based control | Robust policy learning 🧭 |
| Unity / Unreal Engine | Real-time authoring and interactivity | Engine connectors | Faster content iteration ⚙️ |
| ROBLOX / Epic Games | Social and high-fidelity dynamics | Import/export to USD | Human-in-the-loop HRI 🤝 |
As these ecosystems align, one insight stands out: open, physics-accurate, and controllable worlds are the universal substrate for physical AI research and deployment.
Building a Repeatable Synthetic Data Program: Metrics, Governance, and Roadmaps
Establishing a durable synthetic data practice requires more than creative prompts. Teams need KPIs, governance, and iteration loops that tie world generation to safety and productivity outcomes. A practical roadmap helps scale from proofs-of-concept to enterprise standards.
Metrics That Matter
Beyond mean average precision or route completion, organizations should track coverage of environmental conditions, failure-mode discovery rate, and sim-to-real delta for key tasks. A common approach buckets distributions—lighting, weather, materials, occluders—and ensures target coverage per release. Cosmos Transfer makes it easy to “fill in” underrepresented cells without corrupting geometry or calibration.
Governance and Auditability
As WFMs introduce powerful generative controls, audit trails become essential. Record prompts, seeds, asset versions, and engine settings. Keep OpenUSD scene diffs to document every change. This is particularly important in regulated sectors—aviation, healthcare robotics, energy—where reproducibility and traceability underpin certification.
Roadmap: From Pilot to Production
An effective plan starts small—one site, one robot, one set of KPIs—then scales horizontally. Tie synthetic scenarios to real incidents: every near miss becomes a templated scenario family. Over time, maintain a world catalog indexed by hazards, materials, and sensors. Periodically refresh appearance with Cosmos Transfer to avoid overfitting a single look.
- 🧭 Define distributions: lighting, weather, materials, and traffic density.
- 🧱 Template failure modes: glare, occlusion, puddles, reflective floors.
- 🗂️ Curate a world library: tagged by task, sensor, and risk.
- 🔍 Track sim-to-real delta: evaluate drift and recalibrate.
- 🤖 Automate regression: scheduled scenario replays after each model update.
| Phase 🛤️ | Focus 🎯 | Tools 🔧 | Milestone 🏁 |
|---|---|---|---|
| Pilot | One site, one robot, seed coverage | NuRec + SimReady + Predict 2.5 | Baseline sim-to-real gap |
| Expansion | Edge cases and stress tests | MobilityGen + Transfer 2.5 | Coverage targets met 📊 |
| Production | Governance and automation | USD diffs + CI/CD + dashboards | Audited releases and safety gates 🔐 |
Enterprises evaluating platforms can consult deep dives into open frameworks that power robotics pipelines and sector analyses on AI physics for engineering acceleration. The outcome of a disciplined program is consistent: fewer regressions, faster releases, safer deployments.
How do Cosmos world foundation models reduce the sim-to-real gap?
Cosmos Predict 2.5 generates time-consistent, multi-camera worlds that honor geometry and sensor constraints, while Cosmos Transfer 2.5 varies appearance (weather, lighting, materials) without breaking spatial structure. This yields broader training coverage with physics plausibility, improving real-world generalization.
Can teams mix Unity or Unreal Engine assets with Omniverse and OpenUSD?
Yes. OpenUSD connectors let assets, materials, and scene graphs move across Unity, Unreal Engine, ROBLOX, and NVIDIA Omniverse. This preserves semantics and physics properties so content can be exercised by different renderers and simulators.
What KPIs should govern a synthetic data program?
Track coverage of environmental distributions, failure-mode discovery rate, and sim-to-real deltas for key tasks. Include precision/recall, intervention rates, and safety metrics. Maintain audit trails for prompts, seeds, and OpenUSD scene diffs.
Where do real logs fit in a WFM pipeline?
Real logs seed world construction (via NuRec), supply rare behaviors, and serve as the final evaluation benchmark. Synthetic worlds fill coverage gaps, provide perfect labels, and enable safe stress tests. The hybrid of both is recommended.
How do research labs like Google DeepMind or OpenAI benefit from controllable worlds?
Controllable worlds enable rigorous evaluation under distribution shift, curriculum learning, and agentic planning research. Reproducible prompts and seeds help isolate causal factors, accelerating insight and reducing confounds.
Rachel has spent the last decade analyzing LLMs and generative AI. She writes with surgical precision and a deep technical foundation, yet never loses sight of the bigger picture: how AI is reshaping human creativity, business, and ethics.
Comments are closed