Open Ai
Esplorando l’Omniverso: Come i Modelli Fondamentali Open World Creano Ambienti Sintetici per Avanzare l’Intelligenza Artificiale Fisica
Modelli Fondamentali del Mondo Aperto nell’Omniverse: Motori di Ambienti Sintetici per l’Intelligenza Artificiale Fisica
Intelligenza Artificiale Fisica—il cervello software per robot, veicoli autonomi, droni e macchine industriali—deve ragionare su spazio, tempo e fisica in condizioni di incertezza. Addestrare tali sistemi richiede dati diversificati e fisicamente fondati su meteo, illuminazione, materiali e comportamento umano. La raccolta nel mondo reale è lenta, costosa e talvolta pericolosa. La generazione di dati sintetici basata sulla fisica, guidata da NVIDIA Omniverse e modelli fondamentali del mondo aperto (WFM) come Cosmos, colma questa lacuna scalando ambienti, annotazioni e casi limite su richiesta.
I recenti progressi consolidano la generazione del mondo e il trasferimento di dominio in flussi di lavoro coerenti. Cosmos Predict 2.5 unifica Text2World, Image2World e Video2World in un’architettura leggera che produce mondi video multi-camera coerenti e controllabili da un prompt, un’immagine o un clip. Associato a Cosmos Transfer 2.5, i team possono variare l’aspetto—meteo, illuminazione, terreno—mantenendo la struttura spaziale e la plausibilità fisica. Il risultato è un iterazione rapida per percezione, pianificazione e controllo su distribuzioni più ampie di quanto qualsiasi dispiegamento sul campo possa permettersi.
Poiché i WFM sono basati su OpenUSD, i team possono spostare asset, materiali e grafi di scena fluidamente tra toolchain in Unity, Unreal Engine, ROBLOX e Omniverse. I connettori consentono ai team di arte e ingegneria di collaborare senza attriti di formato, mentre i solver fisici impongono realismo. La conseguenza non è solo più dati—è dati migliori e più rappresentativi che stringono il ciclo sim-to-real.
Ugualmente importante, la licenza aperta dei modelli Cosmos WFM e il loro ragionamento personalizzabile offrono ai sviluppatori un controllo preciso sulla composizione e sui vincoli della scena. In contrasto con gli strumenti video puramente generativi, questi WFM rispettano geometria, dinamiche, sensori e illuminazione, permettendo test verificabili. Per l’intelligenza artificiale fisica, la fedeltà a causa-effetto conta più dello stile da solo.
Considerate una startup di logistica che costruisce un robot per consegne su marciapiede. Le ore di campo catturano solo i giorni tipici. Con una pipeline WFM, il team può istanziare rischi rari—pedoni controluce, pozzanghere riflettenti o fari diffusi dalla nebbia—poi annotare su scala con segmentazione pixel-perfetta e LiDAR simulato. La pila di percezione del robot impara non solo a riconoscere oggetti, ma ad anticipare risultati coerenti con la fisica.
La domanda cross-industriale segue. I programmi aerospaziali testano ispezioni autonome sotto luci dure dei hangar. Le aziende energetiche simulano manutenzione in raffineria attorno a squadre in movimento. Le città provano interazioni di flotte con micromobilità. Più ampio è il modello del mondo, più forte è la politica implementata.
- 🧠 Ragionare sulla fisica: collisioni, attrito, occlusione e dinamiche di contatto.
- 🌧️ Espandere i casi limite: angoli bassi di sole, riflessi sulla neve, raffiche e cadute di sensori.
- 🎯 Etichette esatte: segmentazione, profondità, flusso e box 3D allineati su più camere.
- ⚡ Iterazione più veloce: cambiare condizioni senza rifare le riprese reali.
- 🔄 Flussi di lavoro ibridi: mescolare log reali con asset sintetici per una generalizzazione più forte.
| Modalità Dati 🚀 | Punti di Forza ✅ | Lacune ⚠️ | Uso Migliore 🔧 |
|---|---|---|---|
| Solo mondo reale | Alta autenticità, complessità emergente | Casi limite sparsi, costoso, rischi di sicurezza | Benchmarking delle politiche finali |
| Solo sintetico | Variazione infinita, etichette perfette, sicuro | Potenziale gap di dominio | Pre-allenamento e stress test |
| Ibrido (consigliato) 🌟 | Il meglio di entrambi i mondi, diversità controllata | Richiede integrazione degli strumenti | Pipeline di livello produttivo |
Come la sezione successiva svela la pipeline, un tema permane: mondi controllabili sono il percorso più veloce per un’intelligenza artificiale fisica robusta.
Da Prompt a Mondi Fotorealistici: Cosmos Predict 2.5 e Transfer 2.5 in Pratica
Una pipeline reproducibile consente ai team di ingegneria di scalare da una scansione del sito catturata con telefono a una simulazione su scala mondiale con camere, LiDAR e attori. Un flusso comune in quattro parti combina librerie Omniverse, strumenti Isaac e modelli Cosmos WFM per passare dal riferimento al set di training.
Flusso di Lavoro Reference-to-World con OpenUSD
Si inizia ricostruendo la realtà. Con Omniverse NuRec, i team ricostruiscono gemelli digitali da una scansione con smartphone, ottenendo una scena OpenUSD metricamente accurata. Successivamente si popolano con asset SimReady—materiali fisicamente corretti, rig e sensori che rendono in modo coerente attraverso path tracer e rasterizer in Unity, Unreal Engine e Omniverse. Poi si usa Isaac Sim MobilityGen per allestire traiettorie, agenti e logiche di traffico. Infine, si invoca Cosmos Predict 2.5 per la sintesi video multi-view e Cosmos Transfer 2.5 per applicare variazioni controllate di aspetto.
Due miglioramenti si distinguono. Primo, Predict 2.5 consolida tre modelli—Text2World, Image2World, Video2World—così un’unica immagine o clip breve può espandersi in sequenze multi-camera e temporalmente coerenti. Secondo, Transfer 2.5 fornisce un modello 3,5× più piccolo, prestazioni più rapide e migliore allineamento al prompt mantenendo la geometria della scena. Questa combinazione riduce i costi ampliando la copertura.
- 🗺️ NuRec: cattura un sito con telefono e ricostruisce geometria, materiali e scala.
- 🧩 SimReady assets: modelli 3D plug-and-play, sensori e rig per una fisica coerente.
- 🚦 MobilityGen: attori del traffico, percorsi e casi limite come veicoli fermi.
- 🎥 Cosmos Predict 2.5: video multi-camera coerenti da un prompt o riferimento.
- 🎨 Cosmos Transfer 2.5: trasferimento di stile consapevole spazialmente tra camere e nel tempo.
| Capacità 🧩 | Predict 2.5 🎥 | Transfer 2.5 🎨 | Beneficio 📈 |
|---|---|---|---|
| Tipi di input | Testo, immagine, video | Mondo a mondo | Authoring flessibile |
| Output | Video mondi multi-camera, coerenti nel tempo | Scene con stile cambiato ma fedeli spazialmente | Diversità di dati senza deriva |
| Prestazioni | Modello leggero e unificato | 3,5× più piccolo rispetto alla generazione precedente ⚡ | Cicli più veloci, TCO inferiore |
| Fedeltà fisica | Sintesi consapevole della geometria | Preserva struttura e vincoli | Valutazione affidabile |
I team di design industriale possono prototipare veicoli in simulazione, poi validare aerodinamica, sensori di illuminazione e politiche di controllo su scala. Per un contesto più approfondito su come la fisica accelerata dall’AI stia rimodellando i cicli ingegneristici, si veda questa prospettiva su fisica AI che spinge design aerospaziale e automotive. I leader della robotica possono anche esplorare come framework open-source per la robotica di nuova generazione abbrevino i tempi di produzione.
Poiché OpenUSD si compone perfettamente con motori di gioco e piattaforme di contenuto, i creatori negli ecosistemi di Epic Games estendono un mondo in ROBLOX per dati sintetici di interazione, poi riportano gli asset nella simulazione robotica. Gli stessi asset possono essere esercitati da stack di reinforcement learning di OpenAI, Meta AI e Microsoft Research, mentre la valutazione della sicurezza segue protocolli di ricerca ispirati da Google DeepMind e vecchi paper di DeepMind su generalizzazione sotto shift distributivo.
Quando la pipeline è template, nuovi siti e scenari diventano un pulsante premuto ripetibile. Il modello essenziale è semplice: riferimento → componi → genera → varia → valuta.
Studi di Caso: Skild AI, Serve Robotics e Zipline Chiudono il Divario Sim-to-Real
I professionisti stanno già dimostrando il valore dei dati sintetici guidati da WFM. Considerate tre implementazioni dove scala, controllo e consapevolezza fisica si traducono direttamente nelle operazioni.
Cervelli Robot Generici in Skild AI
Skild AI usa Isaac Lab per costruire farm di training scalabili attraverso incarnazioni robotiche e compiti. Con Cosmos Transfer, il team integra catture reali limitate con nuova illuminazione, meteo e texture per stressare le politiche prima delle prove hardware. Il risultato è un trasferimento più rapido a piattaforme reali e una riduzione delle ore di campo—un guadagno non da poco quando ogni tentativo richiede squadre di sicurezza e verifiche di downtime.
Serve Robotics: Autonomia Urbana su Scala
Serve Robotics si allena su migliaia di scenari NVIDIA Isaac Sim, mescolando sintetico con log reali. L’azienda ha cresciuto una delle più grandi flotte robotiche autonome operative in spazi pubblici e ha superato 100.000 consegne in blocchi urbani. I loro robot raccolgono circa 1 milione di miglia mensili e quasi 170 miliardi di campioni immagine-LiDAR. Questi dati rientrano in simulazione, dove i casi limite vengono riprodotti ed espansi, garantendo una navigazione più sicura in quartieri densi.
Oltre al cibo, Serve ha recentemente consegnato potenza di calcolo—distribuendo supercomputer personali AI DGX Spark a creatori come Refik Anadol e Will.I.AM, e team di piattaforme a Ollama. Con circa 1 PFLOP di prestazioni AI, DGX Spark abilita tuning su scrivania, inferenza e sviluppo robotico—accelerando il ciclo dall’idea alla produzione. Per un contesto industriale più ampio, si veda questa analisi su come la fisica AI accelera i workflow ingegneristici.
Zipline: Edge AI a Velocità di Volo
Zipline si affida alla piattaforma AI e robotica NVIDIA Jetson per la consegna con droni. Un recente drop-off DGX Spark presso la struttura di Zipline a Half Moon Bay sottolinea l’importanza delle sinergie cloud-to-edge: addestramento intensivo in data center; validazione rapida in simulazione con Cosmos; inferenza Jetson compatta sul campo. I modelli del mondo aiutano a codificare l’aerodinamica complessa di corridoi suburbani—chiome d’alberi, linee elettriche, taglio del vento—senza rischiare gli aerei.
- 🚚 Serve Robotics: riproduce quasi incidenti urbani e scala casi limite rari.
- 🛩️ Zipline: simula venti a livello di corridoio, occlusioni e variazioni di illuminazione.
- 🤖 Skild AI: unifica il training di politiche su braccia, ruote e bipedi.
- 🧱 Cosmos Transfer: espande la variazione mantenendo la geometria.
- 🧪 Isaac Lab/Sim: scaffold per esperimenti standardizzati e replicabili.
| Organizzazione 🏢 | Strumenti Chiave 🧰 | Metrica di Scala 📊 | Risultato 🎯 |
|---|---|---|---|
| Serve Robotics | Isaac Sim + Cosmos | 100k+ consegne; 1M miglia/mese; 170B campioni | Autonomia urbana più sicura 🚦 |
| Skild AI | Isaac Lab + Cosmos Transfer | Training cross-incarnazione su scala | Trasferimento sim-to-real più rapido ⏩ |
| Zipline | Jetson + Cosmos + DGX Spark | Validazione di volo ad alta frequenza | Inferenza edge affidabile ✈️ |
Questi studi di caso riflettono un modello più ampio: simulare ampiamente, validare con precisione, distribuire con fiducia. Per i team che valutano componenti aperti, si veda l’overview di framework open che accelerano l’innovazione robotica.
Diversità di Dati di Livello Industriale: Lightwheel, FS Studio e Operazioni Minerarie su Scala
Le pipeline WFM influenzano non solo l’autonomia, ma ogni flusso di lavoro dove percezione e controllo dipendono da etichette difficili da ottenere e modalità di fallimento rare. Diverse implementazioni mostrano come esperti di dominio applichino dati sintetici a risultati misurabili.
Lightwheel: Simulazione-prima, OpenUSD al Centro
Lightwheel aiuta i produttori a colmare il divario sim-to-real con asset SimReady e dataset sintetici su larga scala. Basato su OpenUSD, gli ambienti Lightwheel replicano materiali degli asset, modelli di sensori e dinamiche del piano di fabbrica. I robot addestrati in questi mondi si comportano in modo più prevedibile durante il commissioning, riducendo i tempi di inattività e MTTR. Poiché gli asset sono portabili, gli stessi modelli possono essere stressati in Unity, Unreal Engine e renderer NVIDIA Omniverse, rilevando casi limite precocemente.
Miniera: Rilevamento di Massi e Evitamento Costi
Il membro della comunità Omniverse Santiago Villa usa dati sintetici per individuare grandi massi prima che ostruiscano i frantoi. Ogni incidente non rilevato può ritardare le operazioni di sette minuti o più, costando fino a 650.000$ all’anno in perdite di throughput. Generando migliaia di immagini annotate automaticamente sotto varie condizioni di illuminazione e meteo, gli operatori minerari migliorano il recall mantenendo bassi i costi di etichettatura. L’effetto netto è meno blocchi, usura ridotta e aree di lavoro più sicure.
FS Studio: Incrementi nel Throughput Logistico
In partnership con un leader globale della logistica, FS Studio ha creato migliaia di varianti fotorealistiche di pacchi usando Replicator di Omniverse. L’addestramento su questo dataset ha migliorato l’accuratezza nel rilevamento degli oggetti e ridotto i falsi positivi—incrementando direttamente la velocità del nastro e il throughput di sistema. Un approccio simile può valutare dati di interazione in stile ROBLOX per una co-navigazione uomo-robot e riportarli in Omniverse per regressioni di sicurezza, conferendo un realismo a scala consumer agli scenari industriali.
Robots for Humanity e Scott Dempsey: Profondità di Teleoperazione e Gestione Parti
Robots for Humanity ha costruito un ambiente completo Isaac Sim per oil & gas, generando RGB, profondità e segmentazione mentre catturava dati articolari Unitree G1 via teleoperazione. Scott Dempsey ha sviluppato un sintetizzatore di cavi che crea varianti dalle specifiche del produttore e integra set di training con Cosmos Transfer, migliorando il rilevamento e la manipolazione dei cavi. Entrambi gli sforzi enfatizzano il principio: la struttura conta. Quando l’aspetto cambia ma la geometria resta intatta, i modelli generalizzano senza perdere calibrazione.
- 🏭 Portabilità OpenUSD: un grafo di scena, molti renderer e motori.
- 🧪 Esperimenti replicabili: semi deterministici per test A/B equi.
- 📦 Ricchezza del dominio: logistica, minerario, energia e retail in un unico framework.
- 🧵 Variazioni di dettaglio: materiali, cavi, codici a barre e texture pallet.
- 🛡️ Sicurezza prima del dispiegamento: prove virtuali per compiti ad alto rischio.
| Caso d’Uso 🛠️ | Strumenti 🔌 | Metrica/Impatto 📈 | Note 🧭 |
|---|---|---|---|
| Rilevamento massi in miniera | Omniverse + immagini sintetiche | Fino a 650k$/anno risparmiati | Illuminazione e meteo variati 🌦️ |
| Rilevamento pacchi logistici | Replicator + SimReady | Precisione più alta, meno falsi positivi | Incrementi di throughput e velocità nastro 🚚 |
| Manipolazione cavi | Isaac Sim + Cosmos Transfer | Successo nella presa migliorato | Sintetizzatore basato su specifiche produttore 🧵 |
| Apprendimento politiche teleop | Isaac Sim + Unitree G1 | Stabilità sim-to-real migliore | Addestramento profondità + segmentazione 🧩 |
Queste implementazioni mostrano una lezione condivisa: variazione coerente con la fisica porta guadagni duraturi quando combinata con valutazioni rigorose.
Convergenza Ecosistemica: OpenUSD, Omniverse e Leader della Ricerca che Modellano l’Intelligenza Artificiale Fisica
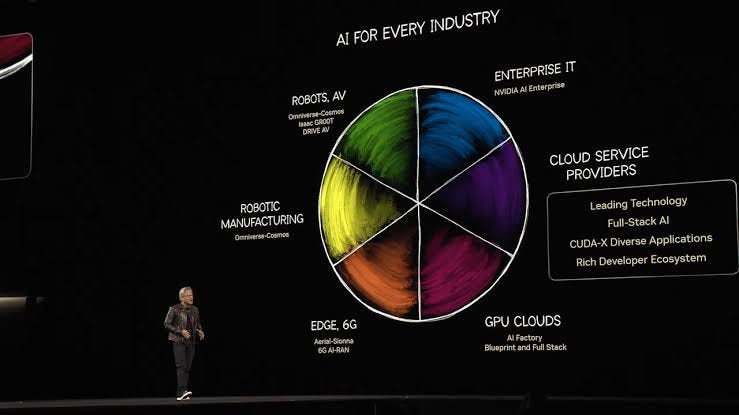
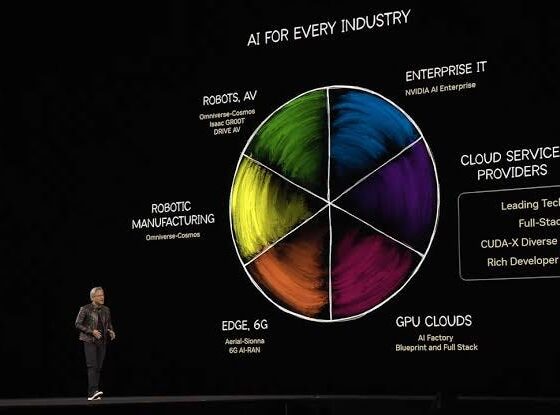
L’Intelligenza Artificiale Fisica prospera dove contenuti, simulazione e ricerca si incrociano. Il recente rilascio dei modelli fondamentali del mondo Cosmos—presentati insieme ai progressi Omniverse in eventi di punta del settore—segnala uno spostamento verso un ragionamento aperto e personalizzabile per la generazione del mondo. Allenati su milioni di ore di video robotici e di guida, questi WFM offrono agli sviluppatori un controllo senza precedenti sulla composizione delle scene rispettando la fisica.
I gruppi di ricerca di OpenAI, Microsoft Research, Meta AI e Google DeepMind continuano a esplorare generalizzazione, pianificazione e stack agentici che beneficiano di mondi sintetici controllabili. Tecniche come curricula, randomizzazione di dominio e identificazione dei sistemi diventano più efficaci quando gli scenari sono resi con materiali, sensori e dinamiche coerenti. Il lavoro storico di DeepMind sullo shift distributivo sottolinea perché la riproducibilità—variazione con semi e prompt tracciabili—deve stare al centro della valutazione.
La convergenza delle toolchain aiuta i team a integrare piattaforme di contenuto con simulazione, poi torna al training. Unity e Unreal Engine continuano a servire authoring in tempo reale, Epic Games espande flussi di lavoro ad alta fedeltà, e ROBLOX contribuisce con dinamiche sociali rilevanti per l’Interazione Uomo-Robot. Con OpenUSD come substrato condiviso, gli asset si muovono tra ecosistemi senza perdere semantica, mentre NVIDIA Omniverse coordina rendering, simulazione dei sensori e logica del mondo.
I player industriali stanno già applicando questi pattern a fabbriche digitali e gemelli robotici. I blueprint Omniverse “mega factory” e gemelli robotici chiariscono come configurare simulatori a scala di flotte con parti standard. Per i professionisti che costruiscono da zero, si consiglia di partire con guide pratiche e flussi di lavoro di riferimento, poi integrare WFM per la diversità dei dati. Una panoramica complementare di framework open-source per la robotica si abbina bene a questa visione su accelerazioni ingegneristiche potenziate dall’AI.
- 📚 Impara in fretta: Percorsi di avvio con Isaac Sim per ROS 2, sensori e dati.
- 🧪 Flussi di lavoro di riferimento: Pipeline AI generative per la generazione di dati sintetici.
- 🍳 Cosmos Cookbook: ricette passo-passo per prompt WFM, controllo e valutazione.
- 📱 Phone-to-twin: cattura un sito con iPhone e ricostruisci in Isaac Sim.
- ☁️ NVIDIA Brev: ambienti GPU preconfigurati per esperimenti di intelligenza artificiale fisica.
| Attore 🌐 | Contributo 🔬 | Interfaccia 🔗 | Impatto 💥 |
|---|---|---|---|
| NVIDIA Omniverse | Rendering, simulazione sensori, gemelli digitali | Connettori OpenUSD | Dati fotorealistici e consapevoli della fisica |
| Cosmos WFMs | Generazione del mondo + trasferimento di stile | Predict 2.5, Transfer 2.5 | Diversità con fedeltà strutturale 🌉 |
| OpenAI / Google DeepMind | Ricerca su pianificazione e generalizzazione | RL, controllo basato su modelli | Apprendimento di politiche robuste 🧭 |
| Unity / Unreal Engine | Authoring in tempo reale e interattività | Connettori motore | Iterazioni più veloci di contenuti ⚙️ |
| ROBLOX / Epic Games | Dinamicità sociale e alta fedeltà | Import/export a USD | Interazione Uomo-Robot in loop 🤝 |
Man mano che questi ecosistemi si allineano, un insight emerge chiaramente: mondi aperti, accurati nella fisica e controllabili sono il substrato universale per la ricerca e il dispiegamento dell’intelligenza artificiale fisica.
Costruire un Programma Ripetibile di Dati Sintetici: Metriche, Governance e Roadmap
Stabilire una pratica duratura di dati sintetici richiede più che prompt creativi. I team hanno bisogno di KPI, governance e cicli di iterazione che colleghino la generazione del mondo agli esiti di sicurezza e produttività. Una roadmap pratica aiuta a scalare da proof-of-concept a standard aziendali.
Metriche che Contano
Oltre alla media della precisione o il completamento del percorso, le organizzazioni dovrebbero tracciare la copertura delle condizioni ambientali, il tasso di scoperta di modalità di guasto e il delta sim-to-real per i compiti chiave. Un approccio comune suddivide le distribuzioni—illuminazione, meteo, materiali, occludenti—e assicura la copertura target per ogni rilascio. Cosmos Transfer facilita il “riempimento” di celle sottorappresentate senza corrompere geometria o calibrazione.
Governance e Auditabilità
Man mano che i WFM introducono potenti controlli generativi, tracciabilità diventa essenziale. Registrare prompt, semi, versioni degli asset e impostazioni del motore. Mantenere diff della scena OpenUSD per documentare ogni modifica. Questo è particolarmente importante in settori regolamentati—aviazione, robotica sanitaria, energia—dove riproducibilità e tracciabilità supportano la certificazione.
Roadmap: Da Pilota a Produzione
Un piano efficace inizia in piccolo—un sito, un robot, una serie di KPI—poi scala orizzontalmente. Collega scenari sintetici a incidenti reali: ogni quasi incidente diventa una famiglia di scenari template. Nel tempo, mantieni un catalogo dei mondi indicizzato per rischi, materiali e sensori. Periodicamente rinnova l’aspetto con Cosmos Transfer per evitare overfitting a un singolo look.
- 🧭 Definisci distribuzioni: illuminazione, meteo, materiali e densità del traffico.
- 🧱 Template di modalità di fallimento: abbagliamento, occlusione, pozzanghere, pavimenti riflettenti.
- 🗂️ Curare una libreria di mondi: etichettata per compito, sensore e rischio.
- 🔍 Tracciare delta sim-to-real: valuta deriva e ricalibra.
- 🤖 Automatizza regressioni: riproduzioni pianificate degli scenari dopo ogni aggiornamento del modello.
| Fase 🛤️ | Focus 🎯 | Strumenti 🔧 | Traguardo 🏁 |
|---|---|---|---|
| Pilota | Un sito, un robot, copertura dei semi | NuRec + SimReady + Predict 2.5 | Gap sim-to-real di base |
| Espansione | Casi limite e test di stress | MobilityGen + Transfer 2.5 | Obiettivi di copertura raggiunti 📊 |
| Produzione | Governance e automazione | Diff USD + CI/CD + dashboard | Rilasci auditati e cancelli di sicurezza 🔐 |
Le aziende che valutano piattaforme possono consultare approfondimenti su framework aperti che alimentano pipeline robotiche e analisi di settore su fisica AI per l’accelerazione ingegneristica. Il risultato di un programma disciplinato è coerente: meno regressioni, rilasci più rapidi, distribuzioni più sicure.
{“@context”:”https://schema.org”,”@type”:”FAQPage”,”mainEntity”:[{“@type”:”Question”,”name”:”Come riducono il gap sim-to-real i modelli fondamentali del mondo Cosmos?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Cosmos Predict 2.5 genera mondi multi-camera coerenti nel tempo che rispettano geometria e vincoli sensoriali, mentre Cosmos Transfer 2.5 varia l’aspetto (meteo, illuminazione, materiali) senza rompere la struttura spaziale. Ciò produce una copertura di training più ampia con plausibilità fisica, migliorando la generalizzazione nel mondo reale.”}},{“@type”:”Question”,”name”:”I team possono mescolare asset Unity o Unreal Engine con Omniverse e OpenUSD?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Sì. I connettori OpenUSD consentono di spostare asset, materiali e grafi di scena tra Unity, Unreal Engine, ROBLOX e NVIDIA Omniverse. Questo preserva la semantica e le proprietà fisiche affinché i contenuti possano essere usati da vari renderer e simulatori.”}},{“@type”:”Question”,”name”:”Quali KPI dovrebbero governare un programma di dati sintetici?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Tracciare la copertura delle distribuzioni ambientali, il tasso di scoperta delle modalità di guasto e i delta sim-to-real per compiti chiave. Includere precisione/recall, tassi di intervento e metriche di sicurezza. Mantenere tracce dettagliate per prompt, semi e differenze delle scene OpenUSD.”}},{“@type”:”Question”,”name”:”Dove si inseriscono i log reali in una pipeline WFM?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”I log reali alimentano la costruzione del mondo (via NuRec), forniscono comportamenti rari e fungono da benchmark finale di valutazione. I mondi sintetici colmano le lacune di copertura, forniscono etichette perfette e permettono stress test in sicurezza. Si consiglia una combinazione di entrambi.”}},{“@type”:”Question”,”name”:”Come beneficiano i laboratori di ricerca come Google DeepMind o OpenAI dei mondi controllabili?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”I mondi controllabili permettono una valutazione rigorosa sotto shift distributivo, apprendimento a curriculum e ricerca su pianificazione agentica. Prompt e semi riproducibili aiutano a isolare fattori causali, accelerando l’insight e riducendo le interferenze.”}}]}Come riducono il gap sim-to-real i modelli fondamentali del mondo Cosmos?
Cosmos Predict 2.5 genera mondi multi-camera coerenti nel tempo che rispettano geometria e vincoli sensoriali, mentre Cosmos Transfer 2.5 varia l’aspetto (meteo, illuminazione, materiali) senza rompere la struttura spaziale. Ciò produce una copertura di training più ampia con plausibilità fisica, migliorando la generalizzazione nel mondo reale.
I team possono mescolare asset Unity o Unreal Engine con Omniverse e OpenUSD?
Sì. I connettori OpenUSD consentono di spostare asset, materiali e grafi di scena tra Unity, Unreal Engine, ROBLOX e NVIDIA Omniverse. Questo preserva la semantica e le proprietà fisiche affinché i contenuti possano essere usati da vari renderer e simulatori.
Quali KPI dovrebbero governare un programma di dati sintetici?
Tracciare la copertura delle distribuzioni ambientali, il tasso di scoperta delle modalità di guasto e i delta sim-to-real per compiti chiave. Includere precisione/recall, tassi di intervento e metriche di sicurezza. Mantenere tracce dettagliate per prompt, semi e differenze delle scene OpenUSD.
Dove si inseriscono i log reali in una pipeline WFM?
I log reali alimentano la costruzione del mondo (via NuRec), forniscono comportamenti rari e fungono da benchmark finale di valutazione. I mondi sintetici colmano le lacune di copertura, forniscono etichette perfette e permettono stress test in sicurezza. Si consiglia una combinazione di entrambi.
Come beneficiano i laboratori di ricerca come Google DeepMind o OpenAI dei mondi controllabili?
I mondi controllabili permettono una valutazione rigorosa sotto shift distributivo, apprendimento a curriculum e ricerca su pianificazione agentica. Prompt e semi riproducibili aiutano a isolare fattori causali, accelerando l’insight e riducendo le interferenze.



Comprendere la proiezione cartografica di Gall-Peters: vantaggi e controversie nel 2025
La realtà dietro la mappa: perché la proiezione Gall-Peters conta ancora Ogni volta che guardi una mappa del mondo standard,...


come creare un processo di accesso sicuro a building link nel 2025
Progettare un Framework di Autenticazione Robusto nell’Era dell’IA L’autenticazione degli utenti definisce il perimetro dell’infrastruttura digitale moderna. Nel panorama del...


Strumenti di Intelligenza Artificiale Principali per Piccole Imprese: Scelte Essenziali per il 2025
Navigare nel panorama dell’IA: Strumenti essenziali per la crescita delle piccole imprese nel 2025 L’orizzonte digitale è cambiato drasticamente. Mentre...


Scegliere tra ChatGPT di OpenAI e Falcon: il miglior modello AI per il 2025
Il panorama dell’intelligenza artificiale è cambiato drasticamente mentre attraversiamo il 2026. La scelta non riguarda più solo la selezione di...


scopri i nomi di conchiglie più affascinanti e i loro significati
Decodificare i Dati Nascosti delle Architetture Marine L’oceano funziona come un vasto archivio decentralizzato di storia biologica. In questa vastità,...


Funko pop news: ultime uscite e drop esclusivi nel 2025
Le principali novità Funko Pop del 2025 e l’impatto continuo nel 2026 Il panorama del collezionismo è cambiato drasticamente negli...


chi è hans walters? scoprendo la storia dietro il nome nel 2025
L’enigma di Hans Walters: analisi dell’impronta digitale nel 2026 Nell’immensa quantità di informazioni disponibili oggi, pochi identificatori presentano una tale...


Esplorando microsoft building 30: un centro di innovazione e tecnologia nel 2025
Ridefinire lo Spazio di Lavoro: Nel Cuore dell’Evoluzione Tecnologica di Redmond Nascosto tra il verde del vasto campus di Redmond,...


I migliori strumenti di intelligenza artificiale per l’assistenza ai compiti nel 2025
L’evoluzione dell’AI per il supporto agli studenti nella classe moderna Il panico per la scadenza della domenica sera sta lentamente...


OpenAI vs Mistral: Quale modello di AI sarà il più adatto per le tue esigenze di elaborazione del linguaggio naturale nel 2025?
Il panorama dell’Intelligenza Artificiale è cambiato drasticamente mentre navighiamo attraverso il 2026. La rivalità che ha definito l’anno precedente—specificamente lo...


come dire addio: modi gentili per gestire i saluti e le conclusioni
Navigare nell’arte di un addio gentile nel 2026 Dire addio è raramente un compito semplice. Che tu stia cambiando carriera...


generatore di nomi per navi pirata: crea oggi il nome della tua leggendaria imbarcazione
Progettare l’Identità Perfetta per la Tua Avventura Marittima Chiamare un’imbarcazione è molto più di un semplice esercizio di etichettatura; è...


Sbloccare la creatività con i prompt diamond body AI nel 2025
Dominare il Framework Diamond Body per la Precisione dell’IA Nell’ambiente in rapida evoluzione del 2025, la differenza tra un output...


Che cos’è canvas? Tutto quello che devi sapere nel 2025
Definizione di Canvas nell’Impresa Digitale Moderna Nell’ambito del 2026, il termine “Canvas” è evoluto oltre una definizione singola, rappresentando una...


come accendere la luce della tastiera del tuo laptop: una guida passo passo
Dominare l’Illuminazione della Tastiera: La Guida Essenziale Passo Dopo Passo Digitare in una stanza poco illuminata, durante un volo notturno...


migliori prompt per mockup di libri per midjourney nel 2025
Ottimizzazione della Visualizzazione dei Libri Digitali con Midjourney nell’Era Post-2025 Il panorama della visualizzazione dei libri digitali è cambiato radicalmente...


Generatori di video per adulti guidati dall’IA: le principali innovazioni da tenere d’occhio nel 2025
L’alba dell’intimità sintetica: ridefinire i contenuti per adulti nel 2026 Il panorama dell’espressione digitale ha subito una trasformazione epocale, in...


ChatGPT vs LLaMA: Quale modello linguistico dominerà nel 2025?
La Battaglia Colossale per la Supremazia dell’IA: Ecosistemi Aperti vs. Giardini Recintati Nel panorama in rapida evoluzione dell’intelligenza artificiale, la...


Padroneggiare le parole iniziali con ch: consigli e attività per lettori alle prime armi
Decifrare il Meccanismo delle Parole Iniziali con CH nella Prima Alfabetizzazione L’acquisizione del linguaggio nei lettori emergenti funziona in modo...


Howmanyofme recensione: scopri quanto è davvero unico il tuo nome
Sbloccare i segreti della tua identità del nome con i dati Il tuo nome è più di una semplice etichetta...
-

 Open Ai1 week ago
Open Ai1 week agoSbloccare il Potere dei Plugin di ChatGPT: Migliora la Tua Esperienza nel 2025
-

 Open Ai6 days ago
Open Ai6 days agoPadroneggiare il Fine-Tuning di GPT: Una guida per personalizzare efficacemente i tuoi modelli nel 2025
-
 Open Ai7 days ago
Open Ai7 days agoConfronto tra ChatGPT di OpenAI, Claude di Anthropic e Bard di Google: quale strumento di IA generativa dominerà nel 2025?
-
 Open Ai6 days ago
Open Ai6 days agoTariffe di ChatGPT nel 2025: Tutto quello che devi sapere su prezzi e abbonamenti
-

 Open Ai7 days ago
Open Ai7 days agoLa Fase di Eliminazione dei Modelli GPT: Cosa Possono Aspettarsi gli Utenti nel 2025
-

 Modelli di IA6 days ago
Modelli di IA6 days agoModelli GPT-4: Come l’Intelligenza Artificiale sta Trasformando il 2025