Open Ai
Исследование Омниверса: как открытые фундаментальные модели создают синтетические среды для развития физического ИИ
Модели базового уровня открытого мира в Omniverse: механизмы создания синтетических сред для физического ИИ
Физический ИИ — программный интеллект для роботов, автономных транспортных средств, дронов и промышленных машин — должен рассуждать о пространстве, времени и физике в условиях неопределённости. Обучение таких систем требует разнообразных, физически обоснованных данных по погоде, освещению, материалам и поведению человека. Сбор данных в реальном мире медленный, затратный и порой небезопасный. Физически основанное генерирование синтетических данных, основанное на NVIDIA Omniverse и моделях базового уровня открытого мира (WFM), таких как Cosmos, решает эту проблему, масштабируя среды, аннотации и крайние случаи по требованию.
Недавние достижения объединяют генерацию мира и перенос домена в целостные рабочие процессы. Cosmos Predict 2.5 объединяет Text2World, Image2World и Video2World в лёгкую архитектуру, которая создаёт последовательные, управляемые мультикамерные видео миры на основе запроса, изображения или видеоклипа. В сочетании с Cosmos Transfer 2.5 команды могут изменять внешний вид — погоду, освещение, рельеф — сохраняя при этом пространственную структуру и физическую правдоподобность. В результате достигаются быстрые итерации восприятия, планирования и управления по более широким распределениям, чем позволяют полевые испытания.
Поскольку WFM основаны на OpenUSD, команды могут без проблем перемещать ассеты, материалы и графы сцен между конвейерами в Unity, Unreal Engine, ROBLOX и Omniverse. Коннекторы позволяют арт-командам и инженерам сотрудничать без проблем с форматами, а физические решатели обеспечивают реализм. Итог — не просто больше данных, а лучшие и более представительные данные, которые укрепляют цикл симуляции и реальности.
Не менее важна открытая лицензия на Cosmos WFM и их настраиваемый механизм рассуждений, предоставляющий разработчикам точный контроль над композицией сцены и ограничениями. В отличие от чисто генеративных видеоинструментов, эти WFM учитывают геометрию, динамику, сенсоры и освещение, позволяя проводить проверяемые тесты. Для физического ИИ точность причинно-следственных связей важнее стиля.
Рассмотрим стартап в области логистики, создающий робота для доставки по тротуарам. Полевые часы фиксируют только типичные дни. С конвейером WFM команда может воспроизводить редкие опасности — пешеходов с подсветкой сзади, отражающие лужи или рассеянные в тумане фары — а затем масштабно аннотировать с помощью идеальной сегментации и смоделированного LiDAR. Стек восприятия робота учится не только распознавать объекты, но и предвидеть физически последовательные последствия.
Популярность в разных отраслях растёт. Аэрокосмические программы тестируют автономный осмотр при жёстком освещении ангаров. Энергетические компании моделируют обслуживание на нефтеперерабатывающих заводах с учётом движущихся бригад. Города отрабатывают взаимодействие флотов с микромобильностью. Чем шире модель мира, тем сильнее готовая политика.
- 🧠 Рассуждения о физике: столкновения, трение, закрытие и динамика контактов.
- 🌧️ Расширение крайних случаев: низкие углы солнца, снежная засветка, порывы ветра и пропадания сенсоров.
- 🎯 Точные метки: сегментация, глубина, поток и 3D-коробки, согласованные между камерами.
- ⚡ Более быстрая итерация: смена условий без повторной съёмки реальных кадров.
- 🔄 Гибридные рабочие процессы: сочетание реальных логов с синтетическими ассетами для лучшей обобщаемости.
| Тип данных 🚀 | Преимущества ✅ | Проблемы ⚠️ | Лучшее применение 🔧 |
|---|---|---|---|
| Только реальные данные | Высокая аутентичность, сложность | Редкие крайние случаи, дороговизна, риски безопасности | Оценка конечных политик |
| Только синтетические | Бесконечное разнообразие, идеальные метки, безопасность | Возможный доменный разрыв | Предварительное обучение и стресс-тесты |
| Гибрид (рекомендуется) 🌟 | Лучшее из двух миров, управляемое разнообразие | Требуется интеграция инструментов | Промышленные конвейеры |
Следующий раздел подробно описывает конвейер, но одна идея сохраняется: управляемые миры — самый быстрый путь к надёжному физическому ИИ.
От запроса к фотореалистичным мирам: Cosmos Predict 2.5 и Transfer 2.5 на практике
Повторяемый конвейер позволяет инженерным командам масштабировать процесс от скана объекта, сделанного на телефон, до симуляции масштаба мира с камерами, LiDAR и актёрами. Общий четырёхэтапный процесс сочетает библиотеки Omniverse, инструменты Isaac и Cosmos WFM для перехода от референса к тренировочному набору.
Рабочий процесс от референса к миру с OpenUSD
Начните с восстановления реальности. С помощью Omniverse NuRec команды создают цифровые двойники из скана смартфоном, получая метрически точную сцену OpenUSD. Затем заполняют её SimReady ассетами — физически корректными материалами, ригами и сенсорами, которые последовательно рендерятся на трассерах путей и растеризаторах в Unity, Unreal Engine и Omniverse. Далее с помощью Isaac Sim MobilityGen создают траектории, агенты и логику движения. Наконец, вызывают Cosmos Predict 2.5 для синтеза мультикамерного видео и Cosmos Transfer 2.5 для применения управляемых изменений внешнего вида.
Выделяются два обновления. Во-первых, Predict 2.5 объединяет три модели — Text2World, Image2World, Video2World — так что одно изображение или короткий клип могут расшириться до мультикамерных, временно согласованных последовательностей. Во-вторых, Transfer 2.5 предлагает в 3.5 раза меньший размер модели, быструю производительность и лучшее соответствие запросам при сохранении геометрии сцены. Это сочетание сокращает расходы и расширяет охват.
- 🗺️ NuRec: захват местности на телефон с восстановлением геометрии, материалов и масштаба.
- 🧩 SimReady ассеты: готовые 3D-модели, сенсоры и риги для согласованной физики.
- 🚦 MobilityGen: актёры движения, маршруты и крайние случаи, например, застрявшие машины.
- 🎥 Cosmos Predict 2.5: последовательное мультикамерное видео из запроса или референса.
- 🎨 Cosmos Transfer 2.5: пространственно осознанный перенос стиля через камеры и время.
| Возможность 🧩 | Predict 2.5 🎥 | Transfer 2.5 🎨 | Преимущество 📈 |
|---|---|---|---|
| Типы входных данных | Текст, изображение, видео | Мир в мир | Гибкая авторизация |
| Выход | Мультикамерные, временно согласованные видео миры | Изменённый стиль, но пространственно точные сцены | Разнообразие данных без дрейфа |
| Производительность | Лёгкая, объединённая модель | В 3.5 раза меньше, чем пред. поколение ⚡ | Быстрые циклы, низкая общая стоимость |
| Физическая правдоподобность | Геометрически обоснованный синтез | Сохраняет структуру и ограничения | Доверительная оценка |
Команды промышленных дизайнеров могут создавать прототипы автомобилей в симуляторах, затем проверять аэродинамику, освещение сенсоров и правила управления в масштабе. Для глубокого понимания того, как ИИ с поддержкой физики меняет инженерные циклы, смотрите обзор ИИ-физики в аэрокосмическом и автомобильном дизайне. Лидеры робототехники также могут изучить, как открытые фреймворки для робототехники нового поколения сокращают время выхода на рынок.
Поскольку OpenUSD легко интегрируется с игровыми движками и контент-платформами, создатели контента в экосистемах Epic Games расширяют мир в ROBLOX для синтетических данных взаимодействия, а затем возвращают ассеты обратно в симуляцию робототехники Omniverse. Те же ассеты могут использоваться в стэках обучения с подкреплением от OpenAI, Meta AI и Microsoft Research, а оценка безопасности соответствует протоколам исследований, вдохновлённым Google DeepMind и историческими статьями DeepMind по обобщению при смещении распределений.
Когда конвейер шаблонизирован, новые площадки и сценарии запускаются кнопкой повторно. Основной шаблон прост: референс → компоновка → генерация → вариация → оценка.
Кейсы: Skild AI, Serve Robotics и Zipline сокращают разрыв между симуляцией и реальностью
Практики уже доказывают ценность синтетических данных на базе WFM. Рассмотрим три внедрения, где масштаб, контроль и физическое осознание напрямую влияют на операции.
Универсальный искусственный интеллект для роботов в Skild AI
Skild AI использует Isaac Lab для создания масштабируемых ферм обучения по разным вариантам роботов и задачам. Благодаря Cosmos Transfer команда дополняет ограниченные реальные захваты новыми условиями освещения, погоды и текстурами для стресс-тестирования политик перед аппаратными испытаниями. Результат — более быстрый перенос на реальные платформы и сокращение полевых часов — значительный выигрыш, когда каждый тест требует бригад безопасности и проверок.
Serve Robotics: Масштабная городская автономия
Serve Robotics обучается на тысячах сценариев NVIDIA Isaac Sim, смешивая синтетические и реальные логи. Компания выросла в одно из крупнейших автономных роботизированных флотов в общественных пространствах и превысила порог в 100 000 доставок по городским кварталам. Их роботы проходят примерно 1 миллион миль ежемесячно и собирают почти 170 миллиардов сэмплов изображений и LiDAR. Эти данные возвращаются в симуляцию, где крайние случаи воспроизводятся и расширяются для безопасной навигации в плотных районах.
Помимо доставки еды, Serve недавно передал вычислительные мощности — доставив DGX Spark персональные AI-суперкомпьютеры таким творцам, как Рефик Анадол и Will.I.AM, а также платформенным командам Ollama. С производительностью около 1 PFLOP DGX Spark позволяет выполнять локальный финетюнинг, инференс и разработку роботов — ускоряя цикл от идеи к развертыванию. Для расширенного взгляда на отрасль ознакомьтесь с анализом ускорения инженерных процессов с помощью ИИ-физики.
Zipline: Edge AI на скорости полёта
Zipline опирается на платформу NVIDIA Jetson для AI и робототехники на краю сети для доставки дронами. Недавний DGX Spark, переданный в их центр в Half Moon Bay, подчёркивает важность синергии облака и края: тяжёлое обучение в дата-центрах; быстрая проверка в симуляторе с Cosmos; компактный Jetson инференс на месте. Модели мира помогают кодировать сложную аэродинамику пригородных коридоров — навесы деревьев, провода, сдвиг ветра — без риска для летательных аппаратов.
- 🚚 Serve Robotics: проигрывание городских аварийных ситуаций и масштабирование редких крайних случаев.
- 🛩️ Zipline: моделирование ветров на уровне коридоров, закрытий и изменений освещения.
- 🤖 Skild AI: объединение обучения политик на руках, колёсах и двуногих роботов.
- 🧱 Cosmos Transfer: расширение вариаций при сохранении геометрии.
- 🧪 Isaac Lab/Sim: стандартизированные, повторяемые платформы экспериментов.
| Организация 🏢 | Основные инструменты 🧰 | Метрики масштабирования 📊 | Результат 🎯 |
|---|---|---|---|
| Serve Robotics | Isaac Sim + Cosmos | 100 тыс.+ доставок; 1 млн миль/мес; 170 млрд сэмплов | Безопасная городская автономия 🚦 |
| Skild AI | Isaac Lab + Cosmos Transfer | Обучение по разным телам в масштабе | Быстрый переход из симуляции в реальность ⏩ |
| Zipline | Jetson + Cosmos + DGX Spark | Высокочастотная проверка полётов | Надёжный инференс на краю ✈️ |
Эти кейсы отражают более широкий тренд: широкое моделирование, точная проверка, уверенное развертывание. Командам, изучающим открытые компоненты, стоит ознакомиться с обзором открытых фреймворков для ускорения робототехнических инноваций.
Диверсификация данных промышленного уровня: Lightwheel, FS Studio и масштабные горные операции
Конвейеры WFM влияют не только на автономию, но и на каждый цикл, в котором восприятие и управление зависят от труднодоступных меток и редких отказов. Несколько внедрений демонстрируют, как отраслевые эксперты применяют синтетические данные для измеримых результатов.
Lightwheel: приоритет симуляции и OpenUSD в основе
Lightwheel помогает производителям уменьшить разрыв симуляции и реальности с помощью SimReady ассетов и больших синтетических датасетов. Построенные на OpenUSD, среды Lightwheel воспроизводят материалы ассетов, модели сенсоров и динамику фабричного цеха. Роботы, обученные в этих мирах, ведут себя предсказуемо при вводе в эксплуатацию, сокращая время простоя и MTTR. Поскольку ассеты портативны, те же модели можно нагрузить в Unity, Unreal Engine и NVIDIA Omniverse для раннего выявления крайних случаев.
Горное дело: обнаружение валунов и снижение затрат
Участник сообщества Omniverse Santiago Villa использует синтетические данные для обнаружения больших валунов до того, как они заклинит дробилки. Каждый пропущенный случай способен задержать работу на семь минут и более, что обходится в до 650 000 долларов в год за счёт снижения пропускной способности. Генерируя тысячи автоматически размеченных изображений при разных условиях освещения и погоды, операторы горнодобывающей промышленности повышают полноту обнаружения при контроле затрат на разметку. Итого — меньше остановок, меньший износ и более безопасные рабочие зоны.
FS Studio: рост пропускной способности в логистике
В партнерстве с глобальным лидером логистики FS Studio создала тысячи фотореалистичных вариантов упаковок с помощью Omniverse Replicator. Обучение на этом датасете повысило точность обнаружения объектов и снизило ложные срабатывания — прямо увеличив скорость ленты и общую пропускную способность системы. Аналогичный подход позволяет проверять ROBLOX-стиль данных взаимодействия для совместной навигации человека и робота и возвращать их в Omniverse для регрессии по безопасности, добавляя реализм на потребительском уровне в промышленные сценарии.
Robots for Humanity и Scott Dempsey: глубина телеоперации и обработка деталей
Robots for Humanity создали полную среду Isaac Sim для нефтегазовой отрасли, генерируя RGB, глубину и сегментацию, одновременно захватывая данные сочленений Unitree G1 с помощью телеоперации. Scott Dempsey разработал синтезатор кабелей, создающий варианты из заводских спецификаций и дополняющий тренировочные наборы Cosmos Transfer, улучшая обнаружение и манипуляцию кабелями. Оба проекта подчеркивают принцип: структура важна. При смене внешнего вида и сохранении геометрии модели обобщаются без потери калибровки.
- 🏭 Портируемость OpenUSD: один граф сцены, много рендереров и движков.
- 🧪 Воспроизводимые эксперименты: детерминированные сиды для честного A/B тестирования.
- 📦 Разнообразие доменов: логистика, горное дело, энергетика и ритейл под одной крышей.
- 🧵 Тонкая вариация: материалы, кабели, штрихкоды и текстуры паллет.
- 🛡️ Безопасность до ввода в эксплуатацию: виртуальные репетиции рискованных задач.
| Кейс 🛠️ | Инструменты 🔌 | Метрика/воздействие 📈 | Примечания 🧭 |
|---|---|---|---|
| Обнаружение горных валунов | Omniverse + синтетические изображения | Экономия до $650 тыс./год | Вариации освещения и погоды 🌦️ |
| Обнаружение упаковок в логистике | Replicator + SimReady | Более высокая точность, меньше ложных срабатываний | Повышение скорости ленты и пропускной способности 🚚 |
| Манипуляция кабелями | Isaac Sim + Cosmos Transfer | Улучшенная успешность захвата | Синтезатор по спецификациям производителя 🧵 |
| Обучение политики телеоперации | Isaac Sim + Unitree G1 | Улучшенная стабильность сим-реал | Обучение с глубиной и сегментацией 🧩 |
Эти проекты демонстрируют общий урок: вариация в соответствии с физикой приносит долговременный эффект в сочетании с тщательной оценкой.
Конвергенция экосистем: OpenUSD, Omniverse и ведущие исследовательские группы, формирующие физический ИИ
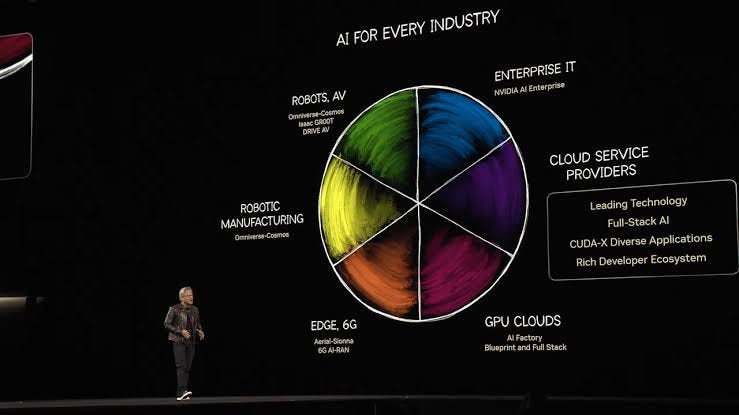
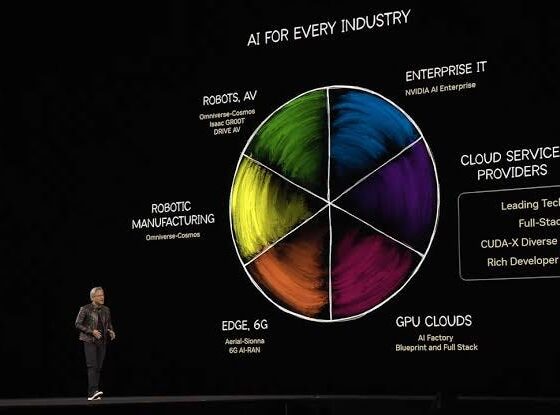
Физический ИИ процветает там, где пересекаются контент, симуляция и исследования. Недавний выпуск моделей мира Cosmos, представленый вместе с достижениями Omniverse на ключевых индустриальных мероприятиях, обозначает сдвиг в сторону открытого, настраиваемого механизма рассуждений для генерации мира. Обученные на миллионах часов видео в робототехнике и вождения, эти WFM дают разработчикам беспрецедентный контроль над композицией сцены с уважением к физике.
Исследовательские группы в OpenAI, Microsoft Research, Meta AI и Google DeepMind продолжают изучать обобщаемость, планирование и агентные стэки, которые выигрывают от управляемых синтетических миров. Приёмы типа учебной программы, рандомизации доменов и идентификации систем становятся более эффективными, когда сценарии рендерятся с согласованными материалами, сенсорами и динамикой. Исторические работы DeepMind по смещению распределений подчёркивают, почему воспроизводимость — вариация с использованием сидов и трассируемых запросов — должна лежать в основе оценки.
Конвергенция конвейеров помогает командам интегрировать контент-платформы с симуляциией, а затем возвращать в обучение. Unity и Unreal Engine продолжают поддерживать создание в реальном времени, Epic Games расширяет высококачественные рабочие процессы, а ROBLOX вносит социальную динамику, важную для взаимодействия человек-робот. Используя OpenUSD как общий субстрат, ассеты свободно перемещаются между экосистемами без потери семантики, а NVIDIA Omniverse координирует рендеринг, симуляцию сенсоров и логику мира.
Промышленные игроки уже применяют эти подходы в цифровых фабриках и роботических двойниках. Шаблоны mega factory Omniverse и роботических двойников показывают, как настраивать симуляторы масштаба флота из стандартных компонентов. Для практиков, начинающих с нуля, есть руководства и эталонные рабочие процессы, которые стоит дополнить WFM для разнообразия данных. Дополнительно к обзору открытых фреймворков робототехники хорошо подойдёт этот материал по ускорению инженерии с ИИ.
- 📚 Учитесь быстро: Начало работы с Isaac Sim для ROS 2, сенсоров и данных.
- 🧪 Эталонные рабочие процессы: генеративные AI-конвейеры для синтетического генерации данных.
- 🍳 Книга рецептов Cosmos: пошаговые инструкции по запросам WFM, управлению и оценке.
- 📱 От телефона к двойнику: захват площадки на iPhone и восстановление в Isaac Sim.
- ☁️ NVIDIA Brev: преднастроенные GPU-среды для экспериментов с физическим ИИ.
| Участник 🌐 | Вклад 🔬 | Интерфейс 🔗 | Влияние 💥 |
|---|---|---|---|
| NVIDIA Omniverse | Рендеринг, симуляция сенсоров, цифровые двойники | Коннекторы OpenUSD | Фотореалистичные, физически осознанные данные |
| Cosmos WFMs | Генерация мира + перенос стиля | Predict 2.5, Transfer 2.5 | Разнообразие с сохранением структуры 🌉 |
| OpenAI / Google DeepMind | Исследования планирования и обобщения | RL, контроль на базе моделей | Надёжное обучение политик 🧭 |
| Unity / Unreal Engine | Создание и интерактивность в реальном времени | Коннекторы движков | Быстрый цикл создания контента ⚙️ |
| ROBLOX / Epic Games | Социальная и высококачественная динамика | Импорт/экспорт в USD | Человек в петле HRI 🤝 |
В меру выравнивания этих экосистем, один вывод очевиден: открытые, физически точные и управляемые миры — универсальный фундамент для исследований и внедрения физического ИИ.
Создание повторяемой программы синтетических данных: метрики, управление и дорожные карты
Запуск устойчивой практики синтетических данных требует не только творческих запросов. Командам нужны ключевые показатели эффективности, управление и циклы итераций, связывающие генерацию мира с безопасностью и продуктивностью. Практическая дорожная карта помогает масштабировать от прототипов до корпоративных стандартов.
Важные метрики
Помимо средней точности и завершения маршрута, организации должны отслеживать покрытие условий среды, скорость обнаружения отказов и разрыв сим-реал по ключевым задачам. Распределения — по освещению, погоде, материалам, препятствиям — разбиваются на категории с проверкой покрытия на релиз. Cosmos Transfer упрощает «заполнение» недопредставленных ячеек без нарушения геометрии и калибровки.
Управление и аудит
С внедрением мощных генеративных контролей в WFM становятся важны аудиторские следы. Записывайте запросы, сиды, версии ассетов и настройки движка. Храните OpenUSD отличия сцен для документирования изменений. Это особенно важно в регулируемых сферах — авиации, робототехнике здравоохранения, энергетике — где воспроизводимость и прослеживаемость лежат в основе сертификации.
Дорожная карта: от пилота к производству
Эффективный план начинается с малого — одна площадка, один робот, набор ключевых показателей — затем масштабируется горизонтально. Связывайте синтетические сценарии с реальными инцидентами: каждый почти-промах становится шаблонным семейством сценариев. Со временем ведите каталог миров, индексируемый по опасностям, материалам и сенсорам. Периодически обновляйте внешний вид с помощью Cosmos Transfer, чтобы избежать переобучения на одном стиле.
- 🧭 Определите распределения: освещение, погода, материалы и плотность трафика.
- 🧱 Шаблоны отказов: засветы, закрытия, лужи, отражающие поверхности.
- 🗂️ Создайте библиотеку миров: помеченную по задачам, сенсорам и рискам.
- 🔍 Отслеживайте разрыв сим-реал: оценивайте дрейф и калибруйте заново.
- 🤖 Автоматизируйте регрессию: плановые проигрывания сценариев после каждого обновления модели.
| Фаза 🛤️ | Фокус 🎯 | Инструменты 🔧 | Этап 🏁 |
|---|---|---|---|
| Пилот | Одна площадка, один робот, покрытие сидов | NuRec + SimReady + Predict 2.5 | Исходный разрыв сим-реал |
| Расширение | Крайние случаи и стресс-тесты | MobilityGen + Transfer 2.5 | Достижение целей покрытия 📊 |
| Производство | Управление и автоматизация | USD отличия + CI/CD + панели мониторинга | Проверенные релизы и защитные барьеры 🔐 |
Компании, оценивающие платформы, могут обратиться к подробным обзорам открытых фреймворков для робототехнических конвейеров и отраслевым анализам по ускорению инженерии с ИИ-физикой. Результат дисциплинированной программы неизменен: меньше регрессий, быстрее релизы, безопаснее развертывания.
{“@context”:”https://schema.org”,”@type”:”FAQPage”,”mainEntity”:[{“@type”:”Question”,”name”:”Как модели базового мира Cosmos сокращают разрыв между симуляцией и реальностью?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Cosmos Predict 2.5 генерирует временно согласованные, мультикамерные миры, учитывающие геометрию и ограничения сенсоров, тогда как Cosmos Transfer 2.5 изменяет внешний вид (погода, освещение, материалы), не нарушая пространственную структуру. Это обеспечивает более широкий охват обучения с физической правдоподобностью, улучшая обобщаемость в реальном мире.”}},{“@type”:”Question”,”name”:”Могут ли команды смешивать ассеты Unity или Unreal Engine с Omniverse и OpenUSD?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Да. Коннекторы OpenUSD позволяют перемещать ассеты, материалы и графы сцен между Unity, Unreal Engine, ROBLOX и NVIDIA Omniverse. Это сохраняет семантику и физические свойства, позволяя использовать контент в разных рендерерах и симуляторах.”}},{“@type”:”Question”,”name”:”Какие KPI должны управлять программой синтетических данных?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Отслеживайте покрытие распределений среды, скорость обнаружения отказов и разрыв сим-реал для ключевых задач. Включайте метрики точности/полноты, уровни вмешательства и безопасность. Поддерживайте аудит запросов, сидов и отличий сцен OpenUSD.”}},{“@type”:”Question”,”name”:”Как реальные логи вписываются в конвейер WFM?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Реальные логи служат основой для построения мира (через NuRec), обеспечивают редкие сценарии и выступают как эталон для финальной оценки. Синтетические миры восполняют пробелы, дают идеальные метки и позволяют безопасно проводить стресс-тесты. Рекомендуется гибридный подход.”}},{“@type”:”Question”,”name”:”Как исследовательские лаборатории, такие как Google DeepMind или OpenAI, выигрывают от управляемых миров?”,”acceptedAnswer”:{“@type”:”Answer”,”text”:”Управляемые миры позволяют проводить строгую оценку при смещении распределений, учебные планы и исследования агентного планирования. Воспроизводимые запросы и сиды помогают изолировать причинные факторы, ускоряя инсайты и снижая влияние помех.”}}]}Как модели базового мира Cosmos сокращают разрыв между симуляцией и реальностью?
Cosmos Predict 2.5 генерирует временно согласованные, мультикамерные миры, учитывающие геометрию и ограничения сенсоров, тогда как Cosmos Transfer 2.5 изменяет внешний вид (погода, освещение, материалы), не нарушая пространственную структуру. Это обеспечивает более широкий охват обучения с физической правдоподобностью, улучшая обобщаемость в реальном мире.
Могут ли команды смешивать ассеты Unity или Unreal Engine с Omniverse и OpenUSD?
Да. Коннекторы OpenUSD позволяют перемещать ассеты, материалы и графы сцен между Unity, Unreal Engine, ROBLOX и NVIDIA Omniverse. Это сохраняет семантику и физические свойства, позволяя использовать контент в разных рендерерах и симуляторах.
Какие KPI должны управлять программой синтетических данных?
Отслеживайте покрытие распределений среды, скорость обнаружения отказов и разрыв сим-реал для ключевых задач. Включайте метрики точности/полноты, уровни вмешательства и безопасность. Поддерживайте аудит запросов, сидов и отличий сцен OpenUSD.
Как реальные логи вписываются в конвейер WFM?
Реальные логи служат основой для построения мира (через NuRec), обеспечивают редкие сценарии и выступают как эталон для финальной оценки. Синтетические миры восполняют пробелы, дают идеальные метки и позволяют безопасно проводить стресс-тесты. Рекомендуется гибридный подход.
Как исследовательские лаборатории, такие как Google DeepMind или OpenAI, выигрывают от управляемых миров?
Управляемые миры позволяют проводить строгую оценку при смещении распределений, учебные планы и исследования агентного планирования. Воспроизводимые запросы и сиды помогают изолировать причинные факторы, ускоряя инсайты и снижая влияние помех.



Понимание проекции карты Галла-Питерса: преимущества и споры в 2025 году
Реальность за картой: почему проекция Галла-Питерса до сих пор важна Каждый раз, когда вы смотрите на стандартную мировую карту, вам...


как создать безопасный процесс входа по ссылке в здание в 2025 году
Проектирование надёжной системы аутентификации в эпоху ИИ Аутентификация пользователя определяет периметр современной цифровой инфраструктуры. В ландшафте 2026 года создание безопасного...


Лучшие инструменты ИИ для малого бизнеса: основные рекомендации на 2025 год
Навигация по ландшафту ИИ: основные инструменты для роста малого бизнеса в 2025 году Цифровой горизонт кардинально изменился. По мере того...


Выбор между ChatGPT от OpenAI и Falcon: лучшая модель ИИ для 2025 года
Пейзаж искусственного интеллекта кардинально изменился, когда мы движемся по 2026 году. Выбор — это уже не просто подбор чатбота; это...


откройте для себя самые захватывающие названия ракушек и их значения
Расшифровка скрытых данных морских архитектур Океан функционирует как огромный децентрализованный архив биологической истории. В этой безбрежной среде морские раковины —...


Funko pop новости: последние релизы и эксклюзивные дропы в 2025 году
Основные новости Funko Pop 2025 года и продолжающееся влияние в 2026 году Ландшафт коллекционирования кардинально изменился за последние двенадцать месяцев....


кто такой hans walters? раскрывая историю за именем в 2025 году
Загадка Ханса Уолтерса: анализ цифрового следа в 2026 году В необъятном пространстве доступной сегодня информации немногие идентификаторы показывают такую дихотомию,...


Изучение microsoft building 30: центр инноваций и технологий в 2025 году
Переосмысление рабочего пространства: в сердце технологической эволюции Редмонда Расположенное среди зелени обширного кампуса в Редмонде, Microsoft Building 30 представляет собой...


Лучшие инструменты ИИ для помощи с домашними заданиями в 2025 году
Эволюция ИИ поддержки студентов в современном классе Паника из-за дедлайна в воскресенье вечером постепенно становится пережитком прошлого. По мере того...


OpenAI vs Mistral: Какая модель ИИ лучше всего подойдет для ваших задач обработки естественного языка в 2025 году?
Пейзаж Искусственного Интеллекта кардинально изменился по мере нашего продвижения в 2026 году. Соперничество, определявшее предыдущий год — особенно столкновение между...


как сказать прощай: нежные способы справиться с прощаниями и окончаниями
Искусство нежного прощания в 2026 году Сказать прощай редко бывает просто. Независимо от того, меняете ли вы карьеру и переходите...


генератор названий пиратских кораблей: создайте имя своего легендарного судна сегодня
Создание идеальной идентичности для вашего морского приключения Назвать судно — это гораздо больше, чем просто приклеить ярлык; это акт определения...


Открывая креативность с diamond body AI prompts в 2025 году
Освоение методологии Diamond Body для точности ИИ В стремительно меняющемся мире 2025 года разница между обычным результатом и шедевром часто...


Что такое canvas? Всё, что нужно знать в 2025 году
Определение Canvas в современном цифровом предприятии В ландшафте 2026 года термин «Canvas» вышел за рамки единственного определения, представляя собой слияние...


как включить подсветку клавиатуры ноутбука: поэтапное руководство
Освоение подсветки клавиатуры: важное пошаговое руководство Печатать в тускло освещенной комнате, в ночном рейсе или во время поздней игровой сессии...


лучшие промпты для мокапов книг для midjourney в 2025 году
Оптимизация визуализации цифровых книг с Midjourney в пост-2025 эпоху Ландшафт визуализации цифровых книг кардинально изменился после алгоритмических обновлений 2025 года....


AI-Driven генераторы взрослого видео: основные инновации, на которые стоит обратить внимание в 2025 году
Рассвет синтетической интимности: переосмысление взрослого контента в 2026 году Ландшафт цифрового выражения претерпел колоссальные изменения, особенно в области производства Adult...


ChatGPT vs LLaMA: Какая языковая модель будет доминировать в 2025 году?
Колоссальная битва за превосходство в сфере ИИ: открытые экосистемы против закрытых платформ В быстро развивающемся ландшафте искусственного интеллекта выбор между...


Освоение начальных слов с ch: советы и задания для юных читателей
Расшифровка механизма начальных слов с CH в ранней грамотности Освоение языка у начинающих читателей работает удивительно похоже на сложную операционную...


Howmanyofme обзор: узнайте, насколько уникально ваше имя на самом деле
Раскрывая секреты вашей идентичности имени с помощью данных Ваше имя — это не просто ярлык в водительских правах; это краеугольный...
-

 Open Ai6 days ago
Open Ai6 days agoGPT-4 Turbo 128k: Раскрывая инновации и преимущества 2025 года
-

 Инструменты2 weeks ago
Инструменты2 weeks agoОткройте лучшие инструменты для генерации имен гномов для уникальных фэнтезийных имен
-

 Open Ai1 week ago
Open Ai1 week agoОткрывая возможности плагинов ChatGPT: улучшите свой опыт в 2025 году
-

 Open Ai6 days ago
Open Ai6 days agoОсвоение тонкой настройки GPT: руководство по эффективной кастомизации ваших моделей в 2025 году
-

 Модели ИИ6 days ago
Модели ИИ6 days agoМодели GPT-4: Как искусственный интеллект преобразует 2025 год
-
 Open Ai7 days ago
Open Ai7 days agoСравнивая ChatGPT от OpenAI, Claude от Anthropic и Bard от Google: какой инструмент генеративного ИИ будет доминировать в 2025 году?