Open Ai
Explorer l’Omniverse : Comment les Open World Foundation Models créent des environnements synthétiques pour faire progresser l’IA physique
Modèles de fondations Open World dans l’Omniverse : moteurs d’environnements synthétiques pour l’IA physique
IA physique—le cerveau logiciel pour les robots, véhicules autonomes, drones et machines industrielles—doit raisonner sur l’espace, le temps et la physique en situation d’incertitude. La formation de tels systèmes nécessite des données diversifiées et physiquement fondées couvrant la météo, l’éclairage, les matériaux et le comportement humain. La collecte dans le monde réel est lente, coûteuse et parfois dangereuse. La génération de données synthétiques physiquement basées, pilotée par NVIDIA Omniverse et des modèles de fondation open world (WFM) tels que Cosmos, comble cette lacune en mettant à l’échelle les environnements, annotations et cas extrêmes à la demande.
Les avancées récentes consolident la génération de mondes et le transfert de domaine en flux de travail cohésifs. Cosmos Predict 2.5 unifie Text2World, Image2World et Video2World dans une architecture légère qui produit des mondes vidéo multi-caméras cohérents et contrôlables à partir d’une invite, d’une image ou d’un clip. Associé à Cosmos Transfer 2.5, les équipes peuvent varier l’apparence — météo, éclairage, terrain — tout en préservant la structure spatiale et la plausibilité physique. Le résultat est une itération rapide pour la perception, la planification et le contrôle sur des distributions plus larges que ce que permet tout déploiement sur le terrain.
Parce que les WFMs sont ancrés dans OpenUSD, les équipes peuvent déplacer actifs, matériaux et graphes de scène fluidement entre chaînes d’outils dans Unity, Unreal Engine, ROBLOX et Omniverse. Les connecteurs permettent aux équipes artistiques et techniques de collaborer sans friction de format, tandis que les solveurs physiques assurent le réalisme. La conséquence n’est pas seulement plus de données — mais de meilleures données, plus représentatives qui resserrent la boucle sim-to-real.
Tout aussi important, la licence ouverte des modèles Cosmos WFMs et leur raisonnement personnalisable donnent aux développeurs un contrôle précis sur la composition de la scène et les contraintes. Contrairement aux outils vidéo purement génératifs, ces WFMs respectent la géométrie, la dynamique, les capteurs et l’éclairage, permettant des tests vérifiables. Pour l’IA physique, la fidélité à la cause à effet importe plus que le style seul.
Considérez une startup logistique construisant un robot de livraison sur trottoir. Les heures de terrain capturent uniquement les jours typiques. Avec un pipeline WFM, l’équipe peut instancier des dangers rares — piétons en contre-jour, flaques réfléchissantes, ou phares diffusés par le brouillard — puis annoter à grande échelle avec une segmentation parfaite au pixel et un LiDAR simulé. La pile de perception du robot apprend non seulement à reconnaître les objets, mais aussi à anticiper des résultats cohérents avec la physique.
La demande intersectorielle suit. Les programmes aérospatiaux testent l’inspection autonome sous un éclairage de hangar sévère. Les compagnies énergétiques simulent la maintenance de raffinerie autour d’équipes en mouvement. Les villes répètent les interactions de flottes avec la micro-mobilité. Plus le modèle de monde est large, plus la politique déployée est robuste.
- 🧠 Raisonner sur la physique : collisions, friction, occlusion et dynamique de contact.
- 🌧️ Étendre les cas extrêmes : angles bas du soleil, éblouissement de la neige, rafales et pertes de capteurs.
- 🎯 Étiquettes exactes : segmentation, profondeur, flux et boîtes 3D alignées entre caméras.
- ⚡ Itération plus rapide : changer les conditions sans refaire des prises du monde réel.
- 🔄 Flux hybrides : mélanger logs réels et actifs synthétiques pour une meilleure généralisation.
| Modalité de données 🚀 | Forces ✅ | Lacunes ⚠️ | Meilleure utilisation 🔧 |
|---|---|---|---|
| Uniquement réel | Authenticité élevée, complexité émergente | Cas extrêmes rares, coûteux, risques de sécurité | Étalonnage des politiques finales |
| Uniquement synthétique | Variation infinie, étiquettes parfaites, sûr | Lacune possible de domaine | Pré-entraînement et tests de résistance |
| Hybride (recommandé) 🌟 | Meilleur des deux mondes, diversité contrôlée | Nécessite intégration des outils | Chaînes de production professionnelles |
Alors que la section suivante déconstruit le pipeline, un thème perdure : les mondes contrôlables sont la voie la plus rapide vers une IA physique robuste.
Du prompt aux mondes photoréalistes : Cosmos Predict 2.5 et Transfer 2.5 en pratique
Un pipeline reproductible permet aux équipes d’ingénierie de passer d’un scan de site capturé par téléphone à une simulation à l’échelle du monde avec caméras, LiDAR et acteurs. Un flux commun en quatre étapes combine les bibliothèques Omniverse, les outils Isaac, et les WFMs Cosmos pour passer de la référence au jeu de données d’entraînement.
Flux de travail référence-à-monde avec OpenUSD
Commencez par reconstruire la réalité. Avec Omniverse NuRec, les équipes reconstruisent des jumeaux numériques à partir d’un balayage smartphone, obtenant une scène OpenUSD métriquement précise. Ensuite, peupler avec des actifs SimReady — matériaux physiquement corrects, rigs et capteurs qui rendent de manière cohérente entre path tracers et rasterizers dans Unity, Unreal Engine et Omniverse. Puis utilisez Isaac Sim MobilityGen pour mettre en scène trajectoires, agents et logiques de trafic. Enfin, invoquez Cosmos Predict 2.5 pour la synthèse vidéo multi-vues et Cosmos Transfer 2.5 pour appliquer des variations contrôlées d’apparence.
Deux améliorations se démarquent. Premièrement, Predict 2.5 consolide trois modèles — Text2World, Image2World, Video2World — pour qu’une seule image ou un court clip puisse se transformer en séquences multi-caméras, temporellement cohérentes. Deuxièmement, Transfer 2.5 offre une taille 3,5× plus petite du modèle, des performances plus rapides, et un meilleur alignement des invites tout en préservant la géométrie de la scène. Cette combinaison réduit les coûts tout en étendant la couverture.
- 🗺️ NuRec : capturer un site avec un téléphone et reconstruire géométrie, matériaux et échelle.
- 🧩 Actifs SimReady : modèles 3D plug-and-play, capteurs et rigs pour une physique cohérente.
- 🚦 MobilityGen : acteurs du trafic, itinéraires et cas extrêmes comme véhicules en panne.
- 🎥 Cosmos Predict 2.5 : vidéo multi-caméras cohérente à partir d’une invite ou référence.
- 🎨 Cosmos Transfer 2.5 : transfert de style conscient spatialement entre caméras et dans le temps.
| Capacité 🧩 | Predict 2.5 🎥 | Transfer 2.5 🎨 | Bénéfice 📈 |
|---|---|---|---|
| Types d’entrée | Texte, image, vidéo | Monde-à-monde | Création flexible |
| Sortie | Mondes vidéo multi-caméras, cohérents dans le temps | Scènes modifiées en style mais fidèles spatialement | Diversité des données sans dérive |
| Performance | Modèle unifié et léger | 3,5× plus petit que la génération précédente ⚡ | Cycles plus rapides, coût total réduit |
| Fidélité physique | Synthèse géométrie-consciente | Préserve structure et contraintes | Évaluation fiable |
Les équipes de design industriel peuvent prototyper des véhicules en simulation, puis valider aérodynamique, capteurs d’éclairage et politiques de contrôle à grande échelle. Pour un contexte plus approfondi sur la manière dont la physique accélérée par IA transforme les cycles d’ingénierie, voir cette perspective sur la physique IA propulsant la conception aérospatiale et automobile. Les leaders en robotique peuvent aussi explorer comment les frameworks open-source pour la robotique nouvelle génération raccourcissent le temps de production.
Parce qu’OpenUSD se compose proprement avec les moteurs et plateformes de contenu, les créateurs dans les écosystèmes Epic Games étendent un monde dans ROBLOX pour des données d’interaction synthétiques, puis rapatrient les actifs dans la simulation robotique. Les mêmes actifs peuvent aussi être exploités par des piles d’apprentissage par renforcement de OpenAI, Meta AI, et Microsoft Research, tandis que l’évaluation de sécurité suit des protocoles de recherche inspirés par Google DeepMind et des publications historiques de DeepMind sur la généralisation sous décalage de distribution.
Quand le pipeline est templatisé, de nouveaux sites et scénarios deviennent un bouton répétable. La méthode essentielle est simple : référence → composer → générer → varier → évaluer.
Études de cas : Skild AI, Serve Robotics et Zipline comblent le fossé sim-to-real
Les praticiens prouvent déjà la valeur des données synthétiques pilotées par WFM. Considérez trois déploiements où échelle, contrôle et conscience physique se traduisent directement en opérations.
Cerveaux robots polyvalents chez Skild AI
Skild AI utilise Isaac Lab pour construire des fermes d’entraînement évolutives couvrant différentes incarnations et tâches robotiques. Avec Cosmos Transfer, l’équipe augmente les captures réelles limitées avec de nouveaux éclairages, météo et textures pour stress-tester les politiques avant les essais matériels. Le résultat est un transfert plus rapide vers les plateformes réelles et une réduction des heures terrain — un gain non négligeable quand chaque tentative nécessite des équipes de sécurité et des contrôles d’arrêt.
Serve Robotics : autonomie urbaine à grande échelle
Serve Robotics s’entraîne sur des milliers de scénarios NVIDIA Isaac Sim, mélangeant données synthétiques et logs réels. La société a développé l’une des plus grandes flottes de robots autonomes opérant dans des espaces publics et dépassé les 100 000 livraisons dans les quartiers urbains. Leurs robots parcourent environ 1 million de miles par mois et collectent près de 170 milliards de paires image-LiDAR. Ces données repartent en simulation où les cas extrêmes sont rejoués et étendus, assurant une navigation plus sûre dans des zones denses.
Au-delà de la nourriture, Serve a récemment livré de la puissance de calcul — déployant des superordinateurs AI personnels DGX Spark à des créateurs comme Refik Anadol et Will.I.AM, ainsi qu’aux équipes plateformes chez Ollama. Avec environ 1 PFLOP de performance IA, DGX Spark permet l’ajustement fin sur bureau, l’inférence et le développement robotique — accélérant la boucle de l’idée au déploiement. Pour un contexte industriel plus large, voir cette analyse de l’accélération des workflows d’ingénierie par la physique IA.
Zipline : IA Edge à vitesse de vol
Zipline s’appuie sur la plateforme robotique et IA Edge NVIDIA Jetson pour la livraison par drone. Une récente livraison DGX Spark au site de Zipline à Half Moon Bay souligne l’importance des synergies cloud-edge : entraînement intensif dans les centres de données ; validation rapide basée sur simulation avec Cosmos ; inférence compacte Jetson sur le terrain. Les modèles de monde aident à encoder l’aérodynamique complexe des corridors suburbains — canopées d’arbres, lignes électriques, cisaillement du vent — sans risquer d’appareils volants.
- 🚚 Serve Robotics : rejouer les quasi-accidents urbains et étendre les cas rares.
- 🛩️ Zipline : simuler vents de corridor, occlusions et variations d’éclairage.
- 🤖 Skild AI : unifier la formation des politiques sur bras, roues et bipèdes.
- 🧱 Cosmos Transfer : étendre la variation tout en préservant la géométrie.
- 🧪 Isaac Lab/Sim : cadres expérimentaux normalisés et reproductibles.
| Organisation 🏢 | Outils clés 🧰 | Mesures d’échelle 📊 | Résultat 🎯 |
|---|---|---|---|
| Serve Robotics | Isaac Sim + Cosmos | 100k+ livraisons ; 1M miles/mois ; 170B échantillons | Autonomie urbaine plus sûre 🚦 |
| Skild AI | Isaac Lab + Cosmos Transfer | Formation multi-incarnation à grande échelle | Transfert sim-to-real accéléré ⏩ |
| Zipline | Jetson + Cosmos + DGX Spark | Validation de vol haute fréquence | Inférence Edge fiable ✈️ |
Ces cas d’usage reflètent un schéma plus large : simuler largement, valider précisément, déployer en toute confiance. Pour les équipes évaluant des composants ouverts, consultez la vue d’ensemble des frameworks ouverts qui accélèrent l’innovation en robotique.
Diversité de données de qualité industrielle : Lightwheel, FS Studio et opérations minières à grande échelle
Les pipelines WFM influencent non seulement l’autonomie, mais tous les flux où perception et contrôle dépendent de labels difficiles à obtenir et de modes de défaillance rares. Plusieurs déploiements montrent comment les experts métiers appliquent les données synthétiques à des résultats mesurables.
Lightwheel : simulation d’abord, OpenUSD au cœur
Lightwheel aide les fabricants à combler le fossé sim-to-real avec des actifs SimReady et de larges ensembles de données synthétiques. Bâti sur OpenUSD, les environnements Lightwheel reproduisent matériaux d’actifs, modèles de capteurs, et dynamiques de plancher d’usine. Les robots entraînés dans ces mondes se comportent de manière plus prévisible lors de la mise en service, réduisant les temps d’interruption et le MTTR. Parce que les actifs sont portables, les mêmes modèles peuvent être stress-testés dans Unity, Unreal Engine, et NVIDIA Omniverse pour détecter tôt les cas extrêmes.
Exploitation minière : détection des rochers et évitement de coûts
Le membre de la communauté Omniverse, Santiago Villa, utilise des données synthétiques pour repérer les gros rochers avant qu’ils n’obstruent les concasseurs. Chaque incident non détecté peut retarder les opérations d’au moins sept minutes, coûtant jusqu’à 650 000 $ par an en pertes de débit. En générant des milliers d’images automatiquement annotées sous divers éclairages et conditions météo, les exploitants miniers améliorent le rappel tout en maîtrisant les coûts d’étiquetage. L’effet net est moins d’arrêts, moins d’usure, et des zones de travail plus sûres.
FS Studio : gains de débit logistique
En partenariat avec un leader mondial de la logistique, FS Studio a créé des milliers de variantes photoréalistes de colis avec Omniverse Replicator. La formation sur ce jeu de données a amélioré la précision de détection d’objets et réduit les faux positifs — augmentant directement la vitesse du tapis et le débit du système. Une approche similaire peut évaluer des données d’interaction de type ROBLOX pour la co-navigation humain-robot et les réintégrer dans Omniverse pour des tests de régression de sécurité, apportant un réalisme à l’échelle consommateur à des scénarios industriels.
Robots for Humanity et Scott Dempsey : profondeur de téléopération et manipulation de pièces
Robots for Humanity a construit un environnement complet Isaac Sim pour le pétrole et gaz, générant RGB, profondeur et segmentation tout en capturant les données de jointure Unitree G1 via téléopération. Scott Dempsey a développé un synthétiseur de câbles qui crée des variantes à partir des spécifications constructeur et enrichit les jeux d’entraînement avec Cosmos Transfer, améliorant la détection et la manipulation des câbles. Les deux efforts soulignent le principe : la structure compte. Quand l’apparence change mais que la géométrie reste intacte, les modèles généralisent sans perdre la calibration.
- 🏭 Portabilité OpenUSD : un graphe de scène, plusieurs moteurs et rendus.
- 🧪 Expériences reproductibles : graines déterministes pour des tests A/B équitables.
- 📦 Richesse du domaine : logistique, mines, énergie et commerce dans un même cadre.
- 🧵 Variation fine : matériaux, câbles, codes-barres et textures de palettes.
- 🛡️ Sécurité avant déploiement : répétitions virtuelles pour tâches à haut risque.
| Cas d’usage 🛠️ | Outils 🔌 | Métrique/Impact 📈 | Notes 🧭 |
|---|---|---|---|
| Détection de rochers en mine | Omniverse + images synthétiques | Jusqu’à 650k $/an économisés | Variations d’éclairage et météo 🌦️ |
| Détection de colis logistique | Replicator + SimReady | Précision accrue, moins de faux positifs | Gains en débit et vitesse de tapis 🚚 |
| Manipulation de câbles | Isaac Sim + Cosmos Transfer | Succès de préhension amélioré | Synthétiseur selon spécifications constructeurs 🧵 |
| Apprentissage politique téléop | Isaac Sim + Unitree G1 | Meilleure stabilité sim-to-real | Entraînement profondeur + segmentation 🧩 |
Ces déploiements montrent une leçon partagée : la variation cohérente avec la physique délivre des gains durables lorsqu’elle est combinée à une évaluation rigoureuse.
Convergence de l’écosystème : OpenUSD, Omniverse et leaders de la recherche façonnant l’IA physique
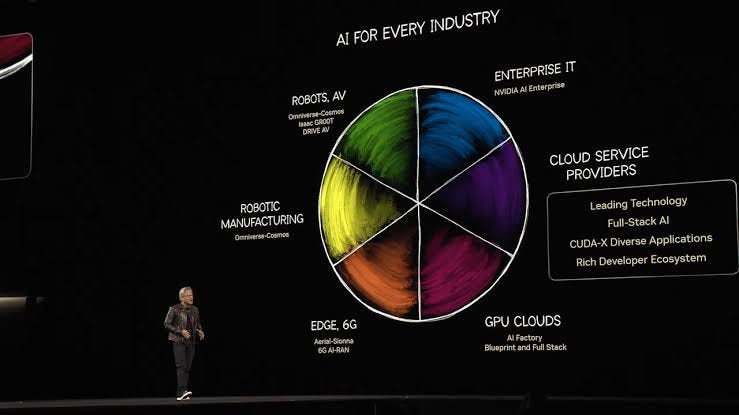
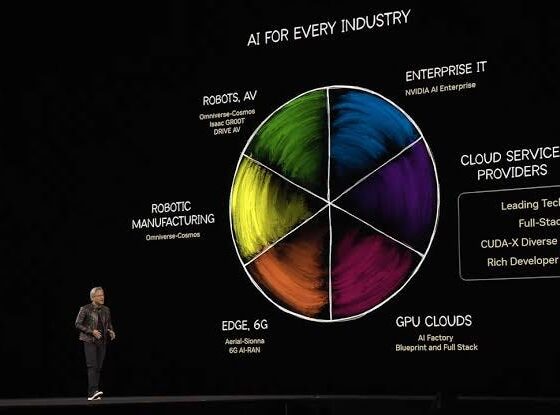
L’IA physique prospère là où contenu, simulation et recherche se croisent. La sortie récente des modèles de fondation Cosmos — présentée aux côtés des avancées Omniverse lors d’événements industriels majeurs — marque un virage vers le raisonnement ouvert et personnalisable pour la génération de mondes. Entraînés sur des millions d’heures de vidéos robotiques et de conduite, ces WFMs offrent aux développeurs un contrôle sans précédent sur la composition des scènes tout en respectant la physique.
Les groupes de recherche chez OpenAI, Microsoft Research, Meta AI et Google DeepMind explorent toujours la généralisation, la planification et les architectures agentiques qui bénéficient de mondes synthétiques contrôlables. Des techniques comme les curricula, la randomisation de domaine et l’identification de système deviennent plus efficaces lorsque les scénarios sont rendus avec matériaux, capteurs et dynamiques cohérents. Les travaux historiques de DeepMind sur le décalage de distribution soulignent pourquoi la reproductibilité — variation semée et invites traçables — doit être au cœur de l’évaluation.
La convergence des chaînes d’outils aide les équipes à intégrer plateformes de contenu avec simulation, puis retour à l’entraînement. Unity et Unreal Engine continuent de servir l’authoring temps réel, Epic Games élargit les workflows haute fidélité, et ROBLOX apporte des dynamiques d’interaction sociale pertinentes pour l’IRC. Avec OpenUSD comme substrat partagé, les actifs circulent entre écosystèmes sans perte de sémantique, tandis que NVIDIA Omniverse coordonne rendu, simulation de capteurs et logique de monde.
Les acteurs industriels appliquent déjà ces schémas aux usines numériques et jumeaux robotiques. Les plans Omniverse “méga usine” et jumeau robotique clarifient comment configurer des simulateurs à l’échelle flotte avec pièces standard. Pour les praticiens partant de zéro, commencez par des guides pratiques et workflows de référence, puis intégrez les WFMs pour la diversité des données. Un aperçu complémentaire des frameworks robotiques open source complète bien cette lecture sur les accélérations de conception par l’IA physique.
- 📚 Apprenez vite : chemins Isaac Sim pour ROS 2, capteurs et données.
- 🧪 Workflows de référence : pipelines IA générative pour génération de données synthétiques.
- 🍳 Cosmos Cookbook : recettes pas à pas pour invites WFM, contrôle et évaluation.
- 📱 Téléphone au jumeau : capture d’un site sur iPhone et reconstruction dans Isaac Sim.
- ☁️ NVIDIA Brev : environnements GPU préconfigurés pour expériences IA physique.
| Acteur 🌐 | Contribution 🔬 | Interface 🔗 | Impact 💥 |
|---|---|---|---|
| NVIDIA Omniverse | Rendu, simulation capteurs, jumeaux numériques | Connecteurs OpenUSD | Données photoréalistes, physique consciente |
| Cosmos WFMs | Génération de mondes + transfert de style | Predict 2.5, Transfer 2.5 | Diversité avec fidélité structurelle 🌉 |
| OpenAI / Google DeepMind | Recherche en planification et généralisation | RL, contrôle basé modèle | Apprentissage de politique robuste 🧭 |
| Unity / Unreal Engine | Authoring temps réel et interactivité | Connecteurs moteurs | Itération de contenu accélérée ⚙️ |
| ROBLOX / Epic Games | Dynamiques sociales et haute fidélité | Import/export en USD | IRC avec humain dans la boucle 🤝 |
Au fur et à mesure que ces écosystèmes s’alignent, une évidence émerge : les mondes ouverts, physiquement précis et contrôlables sont le substrat universel pour la recherche et le déploiement d’IA physique.
Construire un programme de données synthétiques répétable : métriques, gouvernance et feuilles de route
Établir une pratique durable de données synthétiques demande plus que des invites créatives. Les équipes ont besoin de KPI, gouvernance et boucles d’itération qui lient la génération de mondes aux résultats sécurité et productivité. Une feuille de route pratique aide à monter en charge des preuves de concept jusqu’aux standards d’entreprise.
Métriques qui comptent
Au-delà de la précision moyenne ou de l’achèvement de route, les organisations doivent suivre la couverture des conditions environnementales, le taux de découverte des modes de défaillance, et le delta sim-to-real pour les tâches clés. Une approche commune segmente les distributions — éclairage, météo, matériaux, occludeurs — et garantit la couverture cible à chaque version. Cosmos Transfer facilite le « remplissage » des cases sous-représentées sans corrompre la géométrie ni la calibration.
Gouvernance et auditabilité
À mesure que les WFMs introduisent des contrôles génératifs puissants, les traces d’audit deviennent essentielles. Enregistrez les invites, graines, versions d’actifs, et réglages moteurs. Conservez les deltas de scènes OpenUSD pour documenter chaque changement. Ceci est particulièrement important dans les secteurs régulés — aviation, robotique médicale, énergie — où reproductibilité et traçabilité sont la base de la certification.
Feuille de route : du pilote à la production
Un plan efficace commence petit — un site, un robot, un ensemble de KPI — puis s’étend horizontalement. Lie les scénarios synthétiques aux incidents réels : chaque quasi-accident devient une famille de scénarios template. Au fil du temps, maintenez un catalogue de mondes indexé par dangers, matériaux et capteurs. Rafraîchissez périodiquement l’apparence avec Cosmos Transfer pour éviter le surapprentissage d’un seul aspect.
- 🧭 Définir les distributions : éclairage, météo, matériaux et densité de trafic.
- 🧱 Modéliser les modes de défaillance : éblouissement, occlusion, flaques, sols réfléchissants.
- 🗂️ Constituer une bibliothèque de mondes : taguée par tâche, capteur et risque.
- 🔍 Suivre le delta sim-to-real : évaluer la dérive et recalibrer.
- 🤖 Automatiser les régressions : rejouer scénarios programmés après chaque mise à jour de modèle.
| Phase 🛤️ | Focus 🎯 | Outils 🔧 | Jalon 🏁 |
|---|---|---|---|
| Pilote | Un site, un robot, couverture initiale | NuRec + SimReady + Predict 2.5 | Fossé sim-to-real de base |
| Extension | Cas extrêmes et tests de robustesse | MobilityGen + Transfer 2.5 | Objectifs de couverture atteints 📊 |
| Production | Gouvernance et automatisation | Diffs USD + CI/CD + tableaux de bord | Versions auditées et barrières de sécurité 🔐 |
Les entreprises évaluant des plateformes peuvent consulter des analyses approfondies des frameworks ouverts qui alimentent les pipelines robotiques et des études sectorielles sur l’IA physique pour l’accélération de l’ingénierie. Le résultat d’un programme rigoureux est constant : moins de régressions, sorties plus rapides, déploiements plus sûrs.
{« @context »: »https://schema.org », »@type »: »FAQPage », »mainEntity »:[{« @type »: »Question », »name »: »How do Cosmos world foundation models reduce the sim-to-real gap? », »acceptedAnswer »:{« @type »: »Answer », »text »: »Cosmos Predict 2.5 generates time-consistent, multi-camera worlds that honor geometry and sensor constraints, while Cosmos Transfer 2.5 varies appearance (weather, lighting, materials) without breaking spatial structure. This yields broader training coverage with physics plausibility, improving real-world generalization. »}},{« @type »: »Question », »name »: »Can teams mix Unity or Unreal Engine assets with Omniverse and OpenUSD? », »acceptedAnswer »:{« @type »: »Answer », »text »: »Yes. OpenUSD connectors let assets, materials, and scene graphs move across Unity, Unreal Engine, ROBLOX, and NVIDIA Omniverse. This preserves semantics and physics properties so content can be exercised by different renderers and simulators. »}},{« @type »: »Question », »name »: »What KPIs should govern a synthetic data program? », »acceptedAnswer »:{« @type »: »Answer », »text »: »Track coverage of environmental distributions, failure-mode discovery rate, and sim-to-real deltas for key tasks. Include precision/recall, intervention rates, and safety metrics. Maintain audit trails for prompts, seeds, and OpenUSD scene diffs. »}},{« @type »: »Question », »name »: »Where do real logs fit in a WFM pipeline? », »acceptedAnswer »:{« @type »: »Answer », »text »: »Real logs seed world construction (via NuRec), supply rare behaviors, and serve as the final evaluation benchmark. Synthetic worlds fill coverage gaps, provide perfect labels, and enable safe stress tests. The hybrid of both is recommended. »}},{« @type »: »Question », »name »: »How do research labs like Google DeepMind or OpenAI benefit from controllable worlds? », »acceptedAnswer »:{« @type »: »Answer », »text »: »Controllable worlds enable rigorous evaluation under distribution shift, curriculum learning, and agentic planning research. Reproducible prompts and seeds help isolate causal factors, accelerating insight and reducing confounds. »}}]}Comment les modèles de fondation Cosmos réduisent-ils le fossé sim-to-real ?
Cosmos Predict 2.5 génère des mondes multi-caméras cohérents dans le temps qui respectent la géométrie et les contraintes des capteurs, tandis que Cosmos Transfer 2.5 varie l’apparence (météo, éclairage, matériaux) sans rompre la structure spatiale. Cela offre une couverture d’entraînement plus large avec une plausibilité physique, améliorant la généralisation dans le monde réel.
Les équipes peuvent-elles mixer des actifs Unity ou Unreal Engine avec Omniverse et OpenUSD ?
Oui. Les connecteurs OpenUSD permettent aux actifs, matériaux et graphes de scène de circuler entre Unity, Unreal Engine, ROBLOX et NVIDIA Omniverse. Cela préserve la sémantique et les propriétés physiques afin que le contenu puisse être exploité par différents moteurs de rendu et simulateurs.
Quels KPI doivent régir un programme de données synthétiques ?
Suivez la couverture des distributions environnementales, le taux de découverte des modes de défaillance, et les deltas sim-to-real pour les tâches clés. Incluez précision/rappel, taux d’intervention, et métriques de sécurité. Maintenez des traces d’audit pour les invites, graines et diffs de scènes OpenUSD.
Où se situent les logs réels dans un pipeline WFM ?
Les logs réels servent à la construction du monde (via NuRec), apportent des comportements rares, et sont la référence ultime pour l’évaluation finale. Les mondes synthétiques comblent les lacunes de couverture, fournissent des étiquettes parfaites, et permettent des tests de résistance sécurisés. L’hybride des deux est recommandé.
Comment les laboratoires de recherche comme Google DeepMind ou OpenAI bénéficient-ils des mondes contrôlables ?
Les mondes contrôlables permettent une évaluation rigoureuse sous décalage de distribution, un apprentissage par curriculum, et une recherche en planification agentique. Les invites et graines reproductibles aident à isoler les facteurs causaux, accélérant l’insight et réduisant les confondus.



découvrez les noms de coquillages les plus fascinants et leurs significations
Déchiffrer les données cachées des architectures marines L’océan fonctionne comme une vaste archive décentralisée de l’histoire biologique. Dans cette étendue,...


Funko pop actualités : dernières sorties et exclusivités en 2025
Principales nouveautés Funko Pop de 2025 et l’impact continu en 2026 Le paysage de la collection a changé radicalement au...


qui est hans walters ? dévoiler l’histoire derrière le nom en 2025
L’Énigme de Hans Walters : Analyser l’empreinte numérique en 2026 Dans l’immense étendue d’informations disponible aujourd’hui, peu d’identificateurs présentent une...


Explorer le microsoft building 30 : un centre d’innovation et de technologie en 2025
Redéfinir l’espace de travail : au cœur de l’évolution technologique de Redmond Niché au milieu de la verdure du vaste...


Meilleurs outils d’IA pour l’aide aux devoirs en 2025
L’évolution de l’IA d’assistance aux étudiants dans la classe moderne La panique liée à un délai le dimanche soir devient...


OpenAI vs Mistral : Quel modèle d’IA conviendra le mieux à vos besoins en traitement du langage naturel en 2025 ?
Le paysage de l’Intelligence Artificielle a profondément changé alors que nous avançons en 2026. La rivalité qui a marqué l’année...


comment dire au revoir : des façons douces de gérer les adieux et les fins
Naviguer dans l’art d’un adieu en douceur en 2026 Dire adieu est rarement une tâche simple. Que vous pivotiez vers...


générateur de noms de navires pirates : créez le nom de votre navire légendaire dès aujourd’hui
Concevoir l’Identité Parfaite pour Votre Aventure Maritime Nommer un navire n’est pas simplement un exercice d’étiquetage ; c’est un acte de...


Libérer la créativité avec les prompts AI diamond body en 2025
Maîtriser le Cadre Diamond Body pour une Précision IA Dans le paysage en évolution rapide de 2025, la différence entre...


Qu’est-ce que canvas ? Tout ce que vous devez savoir en 2025
Définir Canvas dans l’Entreprise Numérique Moderne Dans le paysage de 2026, le terme « Canvas » a évolué au-delà d’une...


comment allumer la lumière du clavier de votre ordinateur portable : un guide étape par étape
Maîtriser l’illumination du clavier : Le guide essentiel étape par étape Taper dans une pièce faiblement éclairée, lors d’un vol...


meilleures suggestions de maquettes de livre pour midjourney en 2025
Optimiser la Visualisation des Livres Numériques avec Midjourney à l’Ère Post-2025 Le paysage de la visualisation des livres numériques a...


Générateurs de vidéos pour adultes pilotés par l’IA : les principales innovations à surveiller en 2025
L’aube de l’intimité synthétique : redéfinir le contenu pour adultes en 2026 Le paysage de l’expression digitale a connu un bouleversement...


ChatGPT vs LLaMA : Quel modèle de langue dominera en 2025 ?
La bataille colossale pour la suprématie de l’IA : écosystèmes ouverts vs jardins clos Dans le paysage en rapide évolution...


Maîtriser les mots commençant par ch : conseils et activités pour les jeunes lecteurs
Décoder le Mécanisme des Mots Initials en CH dans l’Alphabétisation Précoce L’acquisition du langage chez les jeunes lecteurs fonctionne remarquablement...


Howmanyofme avis : découvrez à quel point votre nom est vraiment unique
Déverrouiller les secrets de l’identité de votre nom avec des données Votre nom est bien plus qu’une simple étiquette sur...


Comprendre le détecteur de sortie gpt-2 : comment il fonctionne et pourquoi c’est important en 2025
Les Mécanismes Derrière le Détecteur de Sortie GPT-2 à l’Ère de l’IA Générative Dans le paysage en évolution rapide de...


Comment intégrer pirate weather avec home assistant : un guide complet étape par étape
L’évolution des données météorologiques hyper-locales dans les écosystèmes de maisons intelligentes La fiabilité est la pierre angulaire de toute installation...


Guide complet 2025 des meilleurs créateurs d’art IA NSFW : tendances et outils essentiels
L’évolution de l’érotisme numérique et le changement technologique de 2025 Le paysage de l’art numérique a connu un bouleversement sismique,...


OpenAI vs Meta : Explorer les différences clés entre ChatGPT et Llama 3 en 2025
Le paysage de l’IA à la fin de 2025 : un affrontement de titans Le secteur de l’intelligence artificielle a...
-

 Open Ai7 jours ago
Open Ai7 jours agoLibérer la puissance des Plugins ChatGPT : améliorez votre expérience en 2025
-

 Open Ai6 jours ago
Open Ai6 jours agoMaîtriser l’ajustement fin de GPT : un guide pour personnaliser efficacement vos modèles en 2025
-
 Open Ai6 jours ago
Open Ai6 jours agoComparer ChatGPT d’OpenAI, Claude d’Anthropic et Bard de Google : quel outil d’IA générative dominera en 2025 ?
-
 Open Ai6 jours ago
Open Ai6 jours agoTarification de ChatGPT en 2025 : Tout ce que vous devez savoir sur les tarifs et abonnements
-

 Open Ai6 jours ago
Open Ai6 jours agoLa suppression progressive des modèles GPT : à quoi les utilisateurs peuvent s’attendre en 2025
-

 Modèles d’IA6 jours ago
Modèles d’IA6 jours agoModèles GPT-4 : Comment l’intelligence artificielle transforme 2025